Download
1 / 14
140 likes | 232 Views
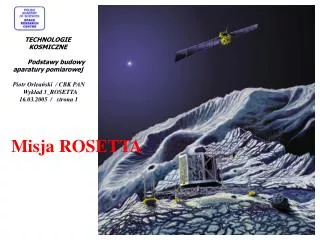
TECHNOLOGIE KOSMICZNE Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN Wykład 2_ROSETTA 04.03.2004 / strona 1. Misja ROSETTA.

E N D
TECHNOLOGIE KOSMICZNE Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN Wykład 2_ROSETTA 04.03.2004 / strona 1 Misja ROSETTA
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 2 Misja ROSETTA Rosetta jest misją fundamentalną (tzw. Cornerstone) w ramach długoterminowego programu naukowego Europejskiej Agencji Kosmicznej - Horyzont 2000. Składa się z dużej stacji orbitalnej, zaprojektowanej do działania przez ponad dziesięć lat w dużej odległości od Słońca, i z małego lądownika. Obydwa obiekty niosą rozbudowany zestaw instrumentów przeznaczonych do przeprowadzenia najbardziej dokładnych badań naukowych komet w historii. Przeznaczenie: badanie komety 67P Churyumov/Gerasimenko. Rakieta nośna: Arianne 5. Statek kosmiczny: masa startowa w przybliżeniu 3000 kg (z pełnym zapasem paliwa) włączajac 1670 kg paliwa, 165 kg aparatury naukowej stacji orbitalnej i 100-kilogramowy ladownik. Rozmiary: statek kosmiczny mieści się w objętości 2,8 x 2,1 x 2,0 m, w której zawierają się wszystkie podsystemy i aparatura naukowa ; dwa 14 metrowej długości panele baterii słonecznych będą miały całkowitą powierzchnię 64 m2.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 3 Misja ROSETTA Rosetta's ten-year expedition begins in March 2004, with an Ariane-5 launch from Kourou in French Guiana. The three-tonne spacecraft will first be inserted into a parking orbit, before being sent on its way towards the outer Solar System.Unfortunately, no existing rocket has the capability to send such a large spacecraft directly to Comet 67P/Churyumov-Gerasimenko. Instead, Rosetta will bounce around the inner Solar System like a ‘cosmic billiard ball’, circling the Sun almost four times during its ten-year trek to Comet 67P/Churyumov-Gerasimenko. Along this roundabout route, Rosetta will enter the asteroid belt twice and gain velocity from gravitational ‘kicks’ provided by close fly-bys of Mars (2007) and the Earth (2005, 2007 and 2009). The spacecraft goes into passive cruise mode on the way to the asteroid belt. Rosetta observes the asteroids from a distance of a few thousand kilometres. After a large deep-space manoeuvre, the spacecraft goes into hibernation. During this period, Rosetta records its maximum distances from the Sun (about 800 million kilometres) and Earth (about 1000 million kilometres). The spacecraft will eventually arrive in the comet’s vicinity in May 2014. Rosetta’s thrusters will then brake the spacecraft, so that it can match Comet 67P/Churyumov-Gerasimenko’s orbit. 02.03.2004; 08:17 CET launch. 10:14 CET the upper stage ignited its own engine. The Rosetta probe was released 18 minutes later. 10:54 CET Rosetta’s sollar arrays were deployed on target. 11:12 CET „Sun Acquisition Mode” has been achieved. 12:30 CET the star-trackers' check was completed and they were switched on. Three of the four reaction wheels were switched on exactly as planned. 03.03 2004, 03:23 CET the deployment of the high-gain antenna was successfully completed . A test manoeuvre will be carried out at 12:45 CET to verify that all orbit and attitude control systems are working properly.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 4 Misja ROSETTA Ważący 100 kilogramów lądownik Rosetty został przygotowany przez międzynarodowe konsorcjum kierowane przez Niemiecki Instytut Aeronautyki (DLR). Przypominający kształtem pudło lądownik będzie przymocowany do ściany stacji orbitalnej podczas lotu do komety. W momencie, gdy stacja orbitalna zostanie ustawiona we właściwej pozycji względem komety, na komendę z Ziemi lądownik odepchnie się od stacji i rozwinie swe trzy nogi, tak by być gotowym do delikatnego lądowania na powierzchni po balistycznym spadku. W momencie lądowania specjalny mechanizm nóg pochłonie znaczną część energii kinetycznej zapobiegając, w ten sposób, niepożądanemu odbiciu; inny mechanizm pozwoli obrócić, podnieść bądź przechylić lądownik do wyprostowanej pozycji. Bezpośrednio po wylądowaniu, wystrzelony z lądownika harpun zakotwiczy go do powierzchni i zapobiegnie ucieczce z komety prawie pozbawionej grawitacji. Minimalny czas działania lądownika został określony na 65 godzin, ale badania powierzchni mogą być prowadzone dalej przez jeszcze wiele miesięcy. Wśród wielu eksperymenów na pokładzie lądownika ROSETTY znajduje się: MUPUS: Wielozadaniowy Czujnik do Badań Powierzchniowych i Podpowierzchniowych (T. Spohn, Univ. of Münster Germany) którego znaczna część była wykonana w CBK PAN
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 5 Misja ROSETTA - penetrator w eksperymencie MUPUS MUPUS (Multi-Purpose Sensors for Surface and Subsurface Science): Wykorzystuje czujniki w harpunie lądownika, w penetratorze i na balkonie by wyznaczyć gęstość oraz własności termiczne i mechaniczne jądra.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 6 W eksperymencie MUPUS głównym zadaniem jest zmierzenie profilu temperatury i przewodności cieplnej w podpowierzchniowych warstwach jądra komety oraz ocenienie wytrzymałości mechanicznej gruntu kometarnego. Dla zrealizowania powyższego celu należało opracować nowatorskie urządzenia i zespoły mechaniczne mogące pracować w ekstremalnych warunkach próżni kosmicznej i bardzo niskiej temperaturze, nawet -150oC. Konstrukcja mechaniczna MUPUS-a zapewnia z jednej strony działanie przy praktycznym braku grawitacji, a z drugiej strony jest zdolna wytrzymać ogromne przeciążenia szokowe i wibracyjne związane głównie ze startem rakiety i oddzieleniem się od niej Orbitera Rosetta. Narzucono restrykcyjne ograniczenia na masę urządzenia, która nie mogła przekroczyć 1.5 kg, a całość składa się z ponad 200 różnych części mechanicznych. Dodatkowo, kilkanaście procent masy z otrzymanego limitu przypadało na elektronikę, kable, złącza i sensory. Tak ciężkie do spełnienia wymagania zmusiły do poszukiwania nowych rozwiązań konstrukcyjnych i technologicznych. Zastosowano specialne materiały, nowoczesne kompozyty i położono szczególny nacisk na rozwiązanie trudnych problemów trybologicznych występujących podczas pracy mechanizmów w warunkach próżni kosmicznej. W próżni, z powodu silnej adhezji materiałów, może nastąpić nawet ich zimne zespawanie, co w konsekwencji prowadzi do nieuniknionej awarii mechanizmu.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 7 Po wylądowaniu na komecie, umieszczony na balkonie lądownika Rosetta, MUPUS ma za zadanie wykonać wiele funkcji przy pomocy swoich mechanizmów, według następującego scenariusza: - W pierwszej fazie jeden mechanizm zwalniający odblokowuje penetrator ze struktury nośnej, zapewniając mu swobodę ruchu, a drugi odblokowuje silnik mechanizmu wysuwającego. - Penetrator jest trzymany parą dżwigni, których końce zawiązano cienką linką wykonaną z najmocniejszych na świecie włókien o nazwie Dyneema. Sprężyny odciągają dżwignie z chwilą gdy linka zostanie przepalona przez specjalne rezystory. Koncepcyjnie podobne rozwiązanie zastosowano również w drugim mechanizmie zwalniającym. - W następnym punkcie scenariusza nalezy przemieścić penetrator skośnie w dół na odległość około 1 m od balkonu lądownika, tak aby znalazł się w pobliżu gruntu komety i nie był zacieniony przez lądownik. Zadanie to wykonuje urządzenie wysuwające, które za pomocą dwóch równoległych sprężystych taśm o profilu prawie zamkniętej litery C transportuje penetrator zamocowany do końca tychże taśm poprzez specjalny uchwyt. Układ jest napędzany specjalnie przystosowanym do pracy w warunkach kosmicznych silnikiem krokowym współpracującym z reduktorem; przekładnią walcową na wejściu i drugą przekładnią ślimakową na wyjściu. Podczas startu taśmy są nawinięte płasko na szpule i zajmują niewiele miejsca, a wysuwając się wracają do swego naturalnego profilu rurowego co zapewnia im odpowiednią sztywność na zginanie i skręcanie. Penetrator wysuwany jest płynnie, bez wstrząsów, z niewielką prędkością. Cała operacja trwa około trzech minut. Jednocześnie odwijany jest, ze specjalnego magazynku, dwudziesto-kilku żyłowy kabel w ekranie. Zawiera on niezbędne przewody zasilające i sygnałowe. Kabel ułożony jest w magazynku w optymalne pętle ósemkowe. Wewnętrzna konstrukcja kabla została również zaprojektowana tak aby zapewnić mu odpowiednią elastyczność, a mimo to do jego odwijania w temperaturze -150°C potrzebna jest znaczna siła. - Gdy ostrze penetratora, trzymanego stabilnie,chociaż z niewielką siłą, w uchwycie urządzenia wysuwającego znajdzie się w odległości kilku centymetrów od gruntu komety - wtedy można rozpocząć wbijanie rury penetratora zawierającej sensory termiczne. Rura penetratora jest wykonana z kompozytu cyanato-estrowego i ma średnicę zewnętrzną 1cm. W projekcie opracowano unikalne w skali światowej (nie stosowane dotychczas w badaniach kosmicznych) elektro-mechaniczne urządzenie wbijające.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 8
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 9 Sercem mechanizmu jest młotek rozpędzany silnym polem elekromagnetycznym. Pomimo, że zasilanie pokładowe gwarantuje zaledwie 1-2 W mocy, silna akcja wbijania jest możliwa. Osiąga się to gromadząc energię w kondensatorze i rozładowując go poprzez cewkę elektromagnesu. Moc w impulsie wynosi wtedy nawet kilka kilowatów i powoduje, że element ruchowy młotka na drodze 6 mm jest w stanie przyspieszyć do prędkości nawet 10 m/s. Tak duża energia uderzenia (ok.1J) zapewnia wbijanie w grunt o wytrzymałości na ściskanie 5-7 Mpa. Przewidując, że grunt kometarny może być również znacznie mniej spójny i wytrzymały, konstrukcja urządzenia wbijającego zapewnia zmienną moc wbijania, stopniowaną na czterech poziomach. Układ sterujący porównuje co kilka uderzeń osiągniętą głębokość penetracji z głębokością założoną, a potem może zwiększyć lub zmniejszyć energię następnego uderzenia. Istotnym utrudnieniem przy wbijaniu jest pomijalnie mały ciężar urządzenia w warunkach pracy na komecie, co powoduje że penetrator jest nie tylko wbijany młotkiem ale również wyciągany odrzucaną w przeciwnym kierunku pozostałą częścią urządzenia. Aby temu zapobiec bardzo starannie dobrano wielkości masy młotka, rurki penetratora i reszty urządzenia, które można nazwać przeciw-masą, jak również zaprojektowano odpowiednio elastyczne zawieszenia pomiędzy tymi trzema współ-oddziałującymi elementami. Ważną rolę w procesie wbijania spełnia tytanowe ostrze z dwunastoma sprężystymi kolcami silnie kotwiczącymi penetrator i nie pozwalającymi na jego wyciąganie.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 10 Elektronika opracowana w CBK pełni dwojakie funkcje; sterującą procesem wbijania młotka i wysuwaniem ramienia uchwytu oraz pomiarową dla pomiaru temperatur i przewodności cieplnej gruntu komety. Część elektroniki obsługuje także inne eksperymenty: pomiaru temperatury wykonywanego w harpunie kotwicy lądownika oraz pomiaru przyśpieszenia z jakim się ten harpun wbija. Część elektroniki instrumentu MUPUS (tzw. "front end electronics") zawierała się w cylindrycznej obudowie penetratora łacznie z mechanicznym zespołem młotkującym i dlatego musiała być wytworzona na płytkach okrągłych. Tu przedstawiono jedną z 3 płytek przeznaczoną dla układu scalonego ASIC. Ta płytka jest modelem STM i dlatego mogła być wykonana ze zwykłego laminatu szklano-epoksydowego FR4. W natępnych modelach EQM i FM konieczne było użycie laminatów polyimidowych dlatego, że instrument ma pracować na zewnątrz lądownika tzn. w warunkach temperatury nawet do -160C co stwarza szczególne wymagania technologiczne. Ponieważ elektronika nie mogła być włączana w temperaturach niższych niż -40C koniecznym było stosowanie systemu podgrzewania elektroniki - grzejnikami.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 11 Zadania badawcze MUPUS’a to - 1) mierzyć rozkład temperatury w podpowierzchniowych warstwach podłoża, i - 2) zmierzyć wartość przewodności termicznej otaczającego go ośrodka
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 12 Szczególne trudności stwarzało przeznaczenie sensorów, które musiały wykazać zdolność do przeżycia nie tylko w próżni kosmicznej i zakresie temperatur od -160C do +80C, lecz również powinny przeżyć samą akcję młotkowania penetratora. Aby przekonać o stopniu trudności tych wymagań wystarczy powiedzieć, że koniec penetratora opatrzony ostrzem doznaje przyśpieszeń szokowych na poziomie 5000 G w czasie akcji młotkowania. Cały instrument badano na odporność na szok zewnętrzny 1000 G. Sensory przeżyły i przeżywają pomyślnie oba rodzaje narażeń. Start rakiety, związane z tym wibracje i szok wybuchowej separacji ostatniego członu rakiety Ariane 5 nie powinny stanowić dla nich zagrożenia. Wszystkie sensory mają rezystancję około 100 ohm i są ze szczególną starannością wykalibrowane.
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 13 Misja ROSETTA - penetrator w eksperymencie MUPUS
TECHNOLOGIE KOSMICZNE, Podstawy budowy aparatury pomiarowej Piotr Orleański / CBK PAN / Wykład 2_ROSETTA / 04.03.2004 / strona 14 Misja ROSETTA - penetrator w eksperymencie MUPUS