Download
1 / 17
200 likes | 516 Views
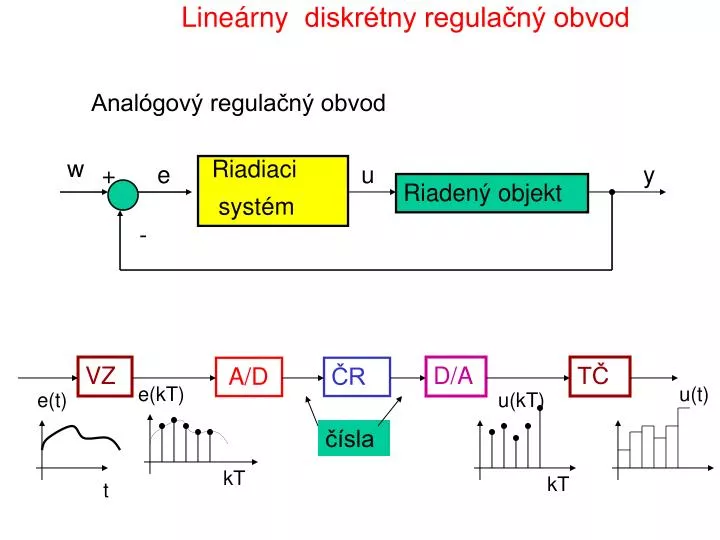
Lineárny diskrétny regulačný obvod. u. y. Riadený objekt. w. +. -. u(t). e(t). u(kT). kT. t. kT. Analógový regulačný obvod. e. Riadiaci systém. VZ. D/A. TČ. A/D. ČR. e(kT). čísla. y. Číslicový regulátor. RO. S. TČ+ RO+S. w(k). G(z). u(k). y(t). y(k).

E N D
Lineárnydiskrétny regulačný obvod u y Riadený objekt w + - u(t) e(t) u(kT) kT t kT Analógový regulačný obvod e Riadiaci systém VZ D/A TČ A/D ČR e(kT) čísla
y Číslicový regulátor RO S TČ+ RO+S w(k) G(z) u(k) y(t) y(k) Číslicový regulačný obvod w(k) ČR D/A TČ y(k) A/D VZ Ekvivalentný LDRO z hľadiska matematického opisu: e(k) GR(z)
xp t h x(t) x* t t Vzorkovač x(t) x p(t) 5T 3T 4T T 2T a) spojitý signál x(t) b) diskrétny signál postupnosť impulz. c) ideálny diskrétny signál zanedbáva sa h
Diskrétna funkcia: Diracov impulz: Diskrétna funkcia:
Laplaceova transformácia diskrétneho signálu je teda: Zavedieme označenie: Z - transformácia
uT(t) u(kT) t t Tvarovač D/A Tvarovač u(kT) uT(t)
u(kT) kT (k+1)T D=kT D=(k+1)T
Im Re -p Frekvenčné vlastnosti tvarovača T log w wv 2wv 3/2 wv 1/2 wv
Lineárne spojité systémy Lineárne diskrétne systémy Diskrétne veličiny: y(k), u(k),e(k) Spojité veličiny y(t), u(t), e(t) Diskrétny čas: t=kT, k=1,2,3,... Diferenciálna rovnica Diferenčná rovnica Z -transformácia L -transformácia
póly G(z): A(z) = 0 zi póly G(s): A(s) = 0 si Im Im 1 Re Re -1 Lineárne spojité systémy Lineárne diskrétne systémy Spojitá prenosová funkcia: Diskrétna prenosová funkcia stabilita G(z): stabilita G(s): Re{si} < 0 Riešenie pre jednoduché póly k=1,2,...
L L-1 L-1 potom g(t) g(kT) L-1 Z t = kT Určenie z impulznej funkcie: Zavedieme diskrétny čas t = kT Diskrétna prenosová funkcia potom bude: Z g(kT) Algoritmus: G(s) g(t) G(z)
L-1 L-1 = L-1 Z Y(z) Z L-1 Z L-1 y(t) y(kT) Diskrétna prenosová funkcia s tvarovačom 0-tého rádu kde
L-1 Z t = kT Algoritmus: y(kT) Y(z) y(t) Matlab: C2D, D2C, C2DM (zadať tvarovač)