Download
1 / 85
850 likes | 950 Views
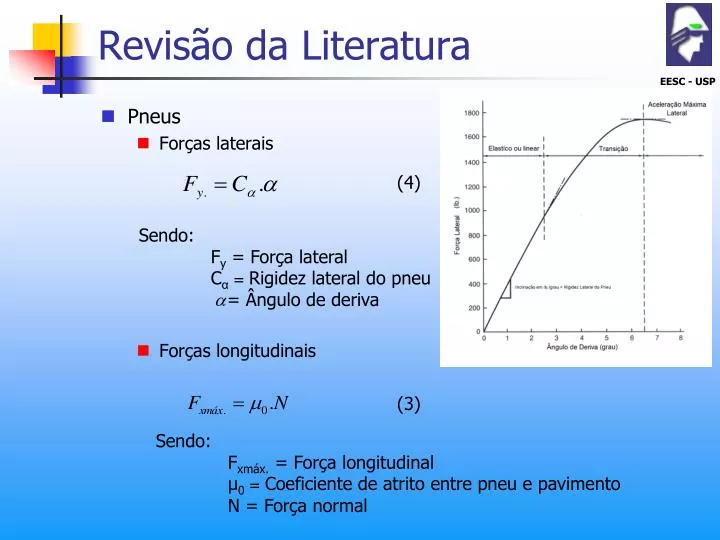
Revisão da Literatura. Pneus Forças laterais Forças longitudinais. (4). Sendo: F y = Força lateral C α = Rigidez lateral do pneu = Ângulo de deriva. (3). Sendo: F xmáx. = Força longitudinal μ 0 = Coeficiente de atrito entre pneu e pavimento N = Força normal.

E N D
Revisão da Literatura • Pneus • Forças laterais • Forças longitudinais (4) Sendo: Fy = Força lateral Cα = Rigidez lateral do pneu = Ângulo de deriva (3) Sendo: Fxmáx. = Força longitudinal μ0 = Coeficiente de atrito entre pneu e pavimento N = Força normal
Revisão da Literatura • Estabilidade Direcional • Tendência decrescente das amplitudes do movimento de um veículo após o término da perturbação • Dirigibilidade é a capacidade e habilidade do conjunto veículo e piloto em sair de uma dada condição de regime permanente para uma outra condição • Regime permanente apresenta acelerações constantes com o tempo • Estabilidade e dirigibilidade são correlacionadas
Revisão da Literatura • Estabilidade Direcional • Estabilidade estática • Tendência de um veículo desenvolver forças e torques que se opõem diretamente a uma perturbação instantânea de uma variável de movimento • Estabilidade dinâmica • Resposta temporal da variável de movimento em questão • Estável • Instável • Indiferente
Revisão da Literatura • Estabilidade Direcional
Revisão da Literatura • Estabilidade Direcional • Modelo da bicicleta • Simplificação da dinâmica lateral • Dois graus de liberdade • Sentido lateral • Sentido de guinada • Muito usado na área • Não considera a transferência de carga lateral • Não considera os movimentos de rolamento e arfagem • Definições e parâmetros empregados posteriormente em modelos mais elaborados
Revisão da Literatura • Estabilidade Direcional • Modelo da bicicleta
Revisão da Literatura • Estabilidade Direcional • Equações de Movimento • Representam os movimentos característicos dos veículos • As variáveis de interesse são: • Velocidade longitudinal (u) • Velocidade lateral (v) • Velocidade de guinada (r)
Revisão da Literatura • Estabilidade Direcional • Equações de Movimento • As equações com as variáveis de interesse são: • Sendo: • N=Momento resultante de guinada • Y=Força lateral • Iz=Momento de inércia de guinada • m=Massa do veículo • ay=Aceleração lateral (5)
Revisão da Literatura • Estabilidade Direcional • Equações de Movimento • Considerando que: • Sendo: • V=Velocidade resultante do veículo • β=Ângulo de escorregamento do veículo • ac=Aceleração centrípeta • R=Raio da curva (6)
Revisão da Literatura • Estabilidade Direcional • Equações de Movimento • O ângulo de deriva do pneu traseiro é: (7) • Sendo b a distância do CG ao eixo traseiro
Revisão da Literatura • Estabilidade Direcional • Equações de Movimento • O ângulo de deriva do pneu dianteiro é: (8) • Sendo a a distância do CG ao eixo dianteiro
Revisão da Literatura • Estabilidade Direcional • Equações de Movimento • As forças laterais nos pneus dianteiros e traseiros são: • Sendo: • Cα=Rigidez lateral dos pneus • f e r=Índices para pneus dianteiros e traseiros, respectivamente (9)
Revisão da Literatura • Estabilidade Direcional • As Equações de Movimento são: • Para a força lateral • Para o momento de guinada (10) (11)
Revisão da Literatura • Estabilidade Direcional • Derivadas de Estabilidade • Estudo de variáveis separadas • Segundo as equações (10) e (11): • Desta forma: (12) (13)
Revisão da Literatura • Estabilidade Direcional • Derivadas de Estabilidade • Comparando (10), (11), (12) e (13): (14)
Revisão da Literatura • Estabilidade Direcional • Derivadas de Estabilidade • De acordo com as equações (5), (10), (13) e (11), as equações de movimento pelo método das derivadas são: (15)
Revisão da Literatura • Estabilidade Direcional • Derivadas de Estabilidade • Milliken (1995) afirma que as derivadas podem ser relativas ao amortecimento, ao controle ou a uma junção de ambos
Revisão da Literatura • Estabilidade Direcional • Gradiente de Esterçamento • Segundo Guillespie (1992), para o regime permanente e considerando o veículo em equilíbrio: • Substituindo (17) em (16): (16) (17) (18)
Revisão da Literatura • Estabilidade Direcional • Gradiente de Esterçamento • Assim, a força lateral desenvolvida no eixo dianteiro deve ser Wr/g multiplicada pela aceleração lateral • Guillespie (1992) afirma que o ângulo de esterçamento é dado por: • Sendo: • W=Peso do veículo • δ=Ângulo de esterçamento (21)
Revisão da Literatura • Estabilidade Direcional • Gradiente de Esterçamento • O ângulo de deriva pode ser calculado como: (Guillespie 1992) • Substituindo a equação (21) em (19) e (20): (19) (20) (22)
Revisão da Literatura • Estabilidade Direcional • O Gradiente de Esterçamento pode ser: • Neutro K=0 (indiferente) • Sobreesterçante K<0 • Subesterçante K>0
Revisão da Literatura • Estabilidade Direcional • Margem de Estabilidade • Sendo: • SM=Margem de estabilidade • e=Distância do ponto de esterçamento neutro ao CG • Pelo método das derivadas:
Revisão da Literatura • Estabilidade Direcional • Regime Transitório • Análise da resposta temporal do veículo • Instável (movimentos amplificados) • Indiferente • Estável (movimentos amortecidos)
Revisão da Literatura • Estabilidade Direcional • Regime Transitório • Frequência natural não amortecida • Fator de amortecimento (37) (38)
Revisão da Literatura • Estabilidade Direcional • Regime Transitório • Fator de amortecimento • (a) =0 Ocorre quando a constante de amortecimento é zero • (b) 0< <1 Denominado subamortecido ou oscilatório amortecido • (c) =1 O sistema é chamado de amortecido crítico. A massa retornará a posição inicial sem oscilar em torno dela • (d) >1 Sobreamortecido. A massa retornará a posicão inicial sem oscilar, porém mais lento do que o amortecido crítico
Revisão da Literatura • Estabilidade Direcional • Regime Transitório • Fator de amortecimento
Inércia Coeficiente de Amortecimento Constante da Mola Sistema massa-mola-amortecedor m C K’ 2 graus de liberdade na notação das derivadas Iz 2 graus de liberdade em parâmetros físicos das derivadas Iz Revisão da Literatura • Estabilidade Direcional • Regime Transitório • Fator de amortecimento • Segundo Milliken (1995)
Revisão da Literatura • Estabilidade Direcional • Regime Transitório • Fator de amortecimento • A frequência natural e o fator de amortecimento pode ser calculado como: (39) (40)
Metodologia • Estabilidade Direcional • Equações de Movimento • Considerando... • k=Raio de giração que descreve o momento de inércia de guinada em relação ao eixo vertical • V=Velocidade de deslocamento do veículo • β=Ângulo de escorregamento da carroçaria • r=Velocidade de guinada • Y1,Y2,Y3,Y4=Forças laterais para cada pneu conforme índice subscrito na figura
Metodologia • Estabilidade Direcional • Equações de Movimento • As equações de movimento para uma curva plana são: (51)
Metodologia • Estabilidade Direcional • Dados iniciais • Peso do veículo (W) • Aceleração da gravidade (g) • Bitola (d) • Distância do CG ao eixo dianteiro (a) • Altura do CG acima do solo (h) • Rigidez das molas dianteiras (kf) • Rigidez das molas traseiras e (kr) • Distância entre-eixos (l) • Raio de giração (k) • Momento de inércia de guinada (Izz) • Velocidade final do teste(V) • Raio da curva (R)
Metodologia • Estabilidade Direcional • Dados iniciais referentes a pneu são: • Pressão interna dos pneus dianteiros (pf) • Pressão interna dos pneus traseiros (pr) • Largura da banda de rodagem do pneu dianteiro (wf) • Largura da banda de rodagem do pneu traseiro (wr) • Diâmetro dos pneus dianteiros (Df) • Diâmetro dos pneus traseiros (Dr) • Rigidez lateral dos pneus dianteiros (Cαf) • Rigidez lateral dos pneus traseiros (Cαr)
Metodologia • Estabilidade Direcional • Peso nas rodas • Devido à aceleração centrípeta há a transferência de carga lateral • A massa suspensa sofre um ângulo de rolamento e as rodas sofrem mudanças de peso • Considerando uma aceleração de , o ângulo de rolamento é: • Sendo • h=Altura do CG em Relação ao solo (52)
Metodologia • Estabilidade Direcional • O Peso dinâmico nas rodas pode ser calculado como: • Sendo • a’=a/l • P=Peso em cada pneu indicado pelo índice subscrito (53)
Metodologia • Estabilidade Direcional • Desempenho dos Pneus • As forças laterais geradas pelos pneus na equação (51) são corrigidas segundo Smiley e Horne (1960) para as não-linearidades dos pneus, considerando: • O diâmetro não defletido do pneu (D) • A largura da banda de rodagem (w) • A pressão de enchimento (p) • A deflexão vertical devido à carga (∆) • O Peso dinâmico sobre o pneu (P) • Este modelo não considera o torque auto-alinhante e o cáster pneumático
Metodologia • Estabilidade Direcional • Desempenho dos Pneus • Segundo Goland e Jindra (1961), o relacionamento entre P e ∆ é assumido linear, portanto: • A equação (54) demonstra as propriedades de pneus carregados com força normal e força lateral variando de acordo com sua deflexão vertical • O coeficiente de desempenho dos pneus (N) pode ser calculado em função de : (54) (55)
Metodologia • Estabilidade Direcional • Desempenho dos Pneus • Para cada pneu é calculado o peso dinâmico (equação 53) • A relação pode ser calculada através da equação (54) • O coeficiente de desempenho dos pneus é calculado pela equação (55) • É possível calcular a força lateral de acordo com o modelo matemático do pneu de Simley e Horne (1960) (56)
Metodologia • Estabilidade Direcional • Desempenho dos Pneus • A segunda parcela da equação (56) [ ] é referente ao ângulo de câmber • O ângulo de deriva dos pneus pode ser calculado de acordo com a equação (57) (57)
Metodologia • Estabilidade Direcional • Margem de Estabilidade (SM) • Sendo • Y12=Soma das forças laterais dos pneus dianteiros • Y34=Soma das forças laterais dos pneus traseiros (58)
Metodologia • Estabilidade Direcional • Polinômio Característico (lugar das raízes) • Estuda a estabilidade inerente ao sistema • Estabilidade estática • Margem de estabilidade estática • Estabilidade dinâmica • Fator de amortecimento dinâmico • Derivada de amortecimento
Metodologia • Estabilidade Direcional • Polinômio Característico • Considera as equações (51), (56) e (57) • Substitui (56) e (57) em (51) formando a equação: • Sendo (60) (61)
Metodologia • Estabilidade Direcional • Polinômio Característico • De (60) a (61) segue o polinômio característico • Sendo (62) (63) (64) (65)
Metodologia • Estabilidade Direcional • Polinômio Característico • As raízes do polinômio podem ser reais e da forma complexa , e representada no tempo por: • Quando a parte real tiver sinal negativo, o veículo é estável; se o sinal for positivo, o veículo é instável • Se a parte imaginária for zero, a resposta dinâmica do sistema é exponencial amortecida (sobreamortecida) • Quando a raiz é um par complexo, a resposta dinâmica do veículo é oscilatória (subamortecida) • Sua grandeza depende tanto da frequência natural amortecida quanto do fator de amortecimento (66)
Metodologia • Estabilidade Direcional • Frequência natural • Fator de amortecimento • Sendo
Metodologia • Estabilidade Direcional • Derivadas • Momento de inércia de guinada • Sendo • c=Distância do CG à extremidade dianteira do veículo • d=Distância do CG à extremidade traseira do veículo • e=Largura total do veículo (67) (68) (69)
Metodologia • Estabilidade Direcional • Veículo Genérico • Veículo de tração 6x2
Metodologia • Estabilidade Direcional • Veículo Genérico • A=5170mm (Distância do eixo dianteiro ao primeiro eixo traseiro) • B=10344mm (Comprimento do veículo) • G=1332mm (Balanço dianteiro) • H=2482mm (Balanço traseiro) • L=1430mm (Distância do eixo dianteiro ao início do equipamento) • M=210 (Ângulo de entrada) • N=170 (Ângulo de saída)
Metodologia • Estabilidade Direcional • Veículo Genérico – Dados de entrada • Peso do veículo vazio (W)=6400kgf • Aceleração local da gravidade (g)=9,8m/s2 • Bitola (d)=1880mm • Distância do CG ao eixo dianteiro (a)=3070mm • Altura do CG (h)=900mm • Rigidez das molas dianteiras (kf)=610.000N/m • Rigidez das molas traseiras (kr)=675.000N/m • Distância entre-eixos (l)=5850mm • Velocidade máxima da simulação (V)=27,78m/s=100km/h • Raio da curva (R)=30,48m • Pressão interna dos pneus (p)=620kPa • Largura da banda de rodagem dos pneus (w)=254,0mm • Diâmetro dos pneus (D)=1016,0mm • Rigidez lateral dos pneus (Cα)=60,00
Metodologia • Estabilidade Direcional • Equipamento Genérico • “furgão sobre chassis” • Comprimento=9000mm • Largura=2600mm • Altura=3050mm • Peso=2500kgf