Download
1 / 8
90 likes | 203 Views
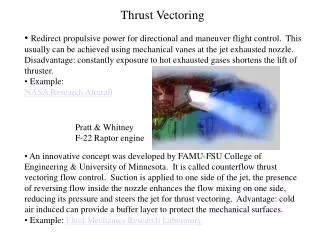
MPC based Rear Wheel Torque Vectoring Near the Limits of Handling. Efstathios Siampis Dr Efstathios Velenis , Dr Stefano Longo Cranfield University. Introduction. Velocity regulation becomes important in terminal understeer cases Design an active safety system that:

E N D
MPC based Rear Wheel Torque Vectoring Near the Limits of Handling EfstathiosSiampis Dr EfstathiosVelenis, Dr Stefano Longo Cranfield University UKACC PhD Presentation Showcase
Introduction • Velocity regulation becomes important in terminal understeer cases • Design an active safety system that: • Stabilizes the vehicle using combined velocity, yaw and sideslip control • Accounts for the important in limit handling conditions system constraints UKACC PhD Presentation Showcase
Approach to Problem Rear wheel torques Driver Intention - MPCs Driver inputs (using the steering, throttle, and brake pedal) + RWD Vehicle Velocity, sideslip angle and yaw rate UKACC PhD Presentation Showcase
Approach to Problem: Target Generation • Steady state cornering analysis of a nonlinear four-wheel vehicle model to derive feasible targets • Then the requested path radius from the driver can be feasible, or not Driver Intention - MPCs + RWD Vehicle UKACC PhD Presentation Showcase
Approach to Problem: Controller Design • For the MPC, we linearize the nonlinear four-wheel vehicle model and use the rear wheel slip as inputs • Constraints are set on yaw rate and sideslip angle, but also on the rear wheels’ slip ratios and torques • Then a sliding mode controller calculates the necessary torques on the rear wheels MPC SMC Rear wheel slip ratios Rear wheel torques Driver Intention - MPCs + RWD Vehicle UKACC PhD Presentation Showcase
Simulations: U-turn scenario Uncontrolled LQR MPCs UKACC PhD Presentation Showcase
Simulations: Double-lane Change Scenario Uncontrolled LQR MPCs UKACC PhD Presentation Showcase
Conclusions and Future Work • Conclusions • Lateral control only not enough for terminal understeer mitigation • Accounting for the system constraints can prevent instability • Future Work • Exploration of different vehicle topologies • Controller testing in the HIL facility of the Automotive Department UKACC PhD Presentation Showcase