Download
1 / 8
90 likes | 689 Views
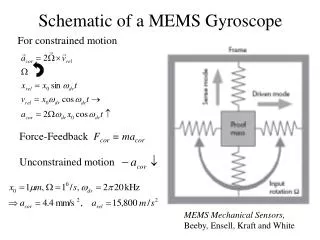
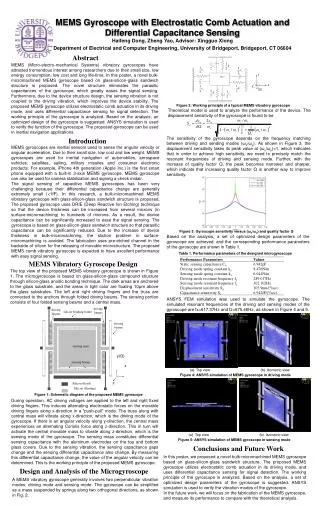
1 st MEMS Commercial Tuning Fork Gyroscope Draper Labs. Area 1mm 2 !.

E N D
1st MEMS Commercial Tuning Fork Gyroscope Draper Labs Area1mm2 ! M. Weinberg, J. Bernstein, S. Cho, A. T. King, A. Kourepenis, P. Ward, and J. Sohn, “A micromachined comb-drive tuning fork gyroscope for commercial applications,” in Proc. Sensor Expo, Cleveland, OH, 1994, pp. 187–193.
Economy of Scale to Lower Cost “..high volume occurred once unit prices achieved $3 target prices.” A Critical Review of MEMS Gyroscopes Technology and Commercialization Status Steven Nasiri, 408-988-7339 x108, snasiri@invensense.com 3150A Coronado Drive, Santa Clara, California 95054
Applications • Automotive: vehicle stability control, rollover detection, navigation, load leveling/suspension control, event recording, collision avoidance • Consumer: computer input devices, handheld computing devices, game controllers, virtual reality gear, sports equipment, camcorders, robots • Industrial: navigation of autonomous (robotic) guided vehicles, motion control of hydraulic equipment or robots, platform stabilization of heavy machinery,humantransporters, yaw rate control of wind-power plants • Aerospace/military: platform stabilization of avionics, stabilization of pointing systems for antennas, unmanned air vehicles, or land vehicles, inertial measurement units for inertial navigation A Critical Review of MEMS Gyroscopes Technology and Commercialization Status Steven Nasiri, 408-988-7339 x108, snasiri@invensense.com 3150A Coronado Drive, Santa Clara, California 95054
UI Research Project- Using AUVs to Measure Magnetic Signature of Naval Vessels
IMU DAU Magnetometer
IMU Specifications Archangel IM3 Data Resolution Body Rates 0.0006°/second @ 200 Hz Accelerations 50 μg @ 200 Hz Data Accuracy (Gyro IMU Mode) Random Walk 2.5°/√hour (C1) 5.2°/√hour (C2) Bias Drift 15°/hour Stability 50°/hr/year Scale Factor Accuracy 0.1% of Full Scale Scale Factor Drift 300 ppm, 1 sigma Cross Axis 0.13% maximum Data Accuracy (Accelerometer) Bias Drift 0.2 mg Scale Factor Accuracy 0.10% of Full Scale Scale Factor Drift 500 ppm, 1 sigma Cross Axis 0.13% maximum Dynamic Range - C1 ±150°/s ±10 g (Linear) - C2 ±300°/s ±10 g Bandwidth (3 db) Rates 40 Hz Maximum Accelerations 50 Hz Maximum