Download
1 / 15
• 150 likes • 324 Views
Izdelava in testiranje modela avta v Simulinku. Aleš Zupanc in Denis Majhenič. Strokovno vodstvo v laboratoriju: prof. dr. Karel Jezernik dr. Miran Rodič. Inštitut za robotiko / Laboratorij za industrijsko robotiko. Vsebina. Uvod Dinamični model vozila Model v Simulinku

E N D
Izdelava in testiranje modela avta v Simulinku Aleš Zupanc in Denis Majhenič Strokovno vodstvo v laboratoriju: prof. dr. Karel Jezernik dr. Miran Rodič Inštitut za robotiko / Laboratorij za industrijsko robotiko
Vsebina • Uvod • Dinamični model vozila • Model v Simulinku • Simulacijski rezultati • Eksperimentalni rezultati • Zaključek
Uvod • Namen naloge – izpeljava, izvedba in ovrednotenje dinamičnega modela električnega vozila • Simulacije v orodju Matlab/Simulink • Preizkušanje na sistemu za dinamično emulacijo mehanskih bremen
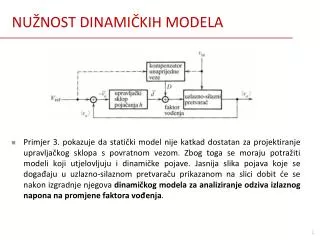
Fzraka Fkotaljenje Fkotaljenje Ftrx Ftrx Mg N1 N2 Dinamični model električnega vozila
Primerjava navora zračnega upora in navora viskoznega trenja
Vodenje pod različnimi pogoji • Nagib cestišča 0° • Nagib cestišča 5° navzgor
Eksperimentalni sistem • Pogonski motor (AM): • Tip T100L8 • 1,5 kW • 220/380 V • 7,6/4,4 A • 920 rpm • Aktivno breme (BLMM): • 142UMD400CACAA • 10,7 Nm/19,8 Nm • 380/480 V • 8,9/16,5 A • 4000 rpm
Zaključek • Zapisan je dinamični model električnega vozila • Model je izveden v Simulinku • Izvedeno linearno vodenje po hitrosti – za ocenitev modela • Testiranje v simulacijah in na sistemu za dinamično emulacijo mehanskih bremen • Problem – pravilna nastavitev parametrov.