Download
1 / 26
290 likes | 717 Views
La Robotique. Joscelin OUDRY IR2000 année 2002-2003. Plan. Buts & domaines d’applications Historique Composition d’un robot Qu’est-ce qu’un microcontrôleur ? Programmation d’un microcontrôleur. Les constructeurs par ordre d’importance Un robot : Comment ça marche ? Bibliographie.

E N D
La Robotique Joscelin OUDRY IR2000 année 2002-2003
Plan • Buts & domaines d’applications • Historique • Composition d’un robot • Qu’est-ce qu’un microcontrôleur ? • Programmation d’un microcontrôleur. • Les constructeurs par ordre d’importance • Un robot : Comment ça marche ? • Bibliographie
Buts & domaines d’application • Tâches répétitives et/ou précises. • Conditions de travail trop dangereuses. • Automatique - traitement d'images - adaptation, perception, interaction avec l'environnement.
Domaines d’application • Manipulation - soudure - assemblage. • Usines - laboratoires - hôpitaux • Industrie automobile > 50% de l’ensemble des robots industriels.
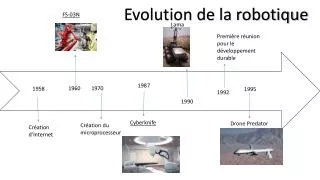
Historique (1) • Robot robota(Tchèque) travail forcé. • Robotique SF Isaac Asimov (1942). • Machine programmable qui imite des actions d'une créature intelligente.
Historique (2) • I. Automates actions répétitives. • II. Dotés de capteurs réagir à l'environnement qui les entoure. • III. Dotés d'intelligence artificielle prise de décisions.
Composition d’un robot de 2eme génération • Structure mécanique. • Servo-moteurs. • Capteurs. • Partie commande (Microcontrôleur).
Le microcontrôleur :cerveau du robot (1) • Un microprocesseur. • Mémoire de données (RAM et EEPROM) . • Mémoire programmable (ROM, OTPROM, UVPROM, EEPROM).
Le microcontrôleur :cerveau du robot (2) • Interfaces parallèles connexion des entrées/sorties. • Interfaces séries. • Timers générer ou mesurer des signaux avec une grande précision temporelle. • CAN traiter les signaux analogiques.
Programmation d’un microcontrôleur (1) • BASIC, C, C++, JAVA. • Le programme réalisé dans le langage de haut niveau est compilé en assembleur pour le microcontroleur. • Transmission du code généré du PC sur le microcontroleur.
Programmation d’un microcontrôleur (2) • Utilisation d’un logiciel de programmation haut niveau(JETPROG de lextronic). • Programmateur hardware pour les EEPROM.
Les constructeurs par ordre d’importance • Motorola (68HC11) • Microchip (séries des PIC) • Mitsubishi (M30620) • NEC (78C10) • Philips (80C552) • Intel (8051)
Types de microcontrôleurs • 4 bits automatismes simples(jouets,...).Fabriqués en grande quantité. • 8 bits les plus répendus (souplesse). • 16 bits applications exigeantes. • 32 bits gros projets.
Un robot : Comment ça marche ? • Pourquoi la marche? • Utiliser une plus grande variété de terrains. • Le sol peut-être irrégulier voir parsemé de petits obstacles. • Pouvoir l’utiliser là ou va l'homme.
Les problèmes de la marche • Gestion du centre de gravité équilibre. • Comment garder cet équilibre ? • Centre de gravité bas. • Un corps large stabilité plus aisée à maintenir.
Deux types de marches • Marche dynamique :- Perte d'équilibre entre chaque pas.- Difficulté : s'arrêter en pleine marche. • Marche quasi-statique :- Le robot ne sera jamais en déséquilibre.
La marche quasi-statique (1) • Première solution : • Utiliser de grands pieds encadrant la zone centrale. • Forme de « U » par exemple. • Problème : Changements de direction difficiles à mettre en place.
La marche quasi-statique (3) • Seconde solution : • Amener le centre de gravité au dessus polygone de sustentation. • Déplacer avant chaque pas,une partie de la masse du robot au dessus du pied restant en appui.
Conclusion • La marche statique peut être implantée relativement facilement. • Changement de direction Nombre de moteurs et complexité du montage augmentent. • Indispensable pour l’interaction avec l'environnement (suivre la lumière, éviter un obstacle, ...).
Bibliographie • www.vieartificielle.com • www.csdm.qc.ca • www.inria.fr