Download
1 / 54
540 likes | 713 Views
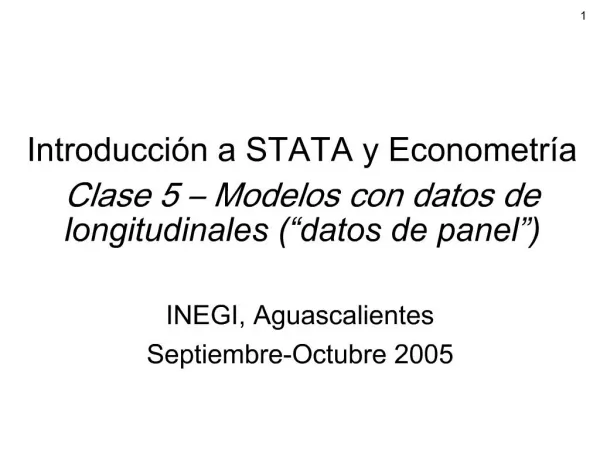
Introducción a la IA. Inteligencia Artificial Capítulo I. Agentes inteligentes. Un agente inteligente. Procesos INTERNOS. ENTRADAS. Conoce. Sensor del ambiente. Comprensión/ intencionalidad. Vé Oye Toca Gusta Huele. Razona. Comportamiento. SALIDAS.

E N D
Introducción a la IA Inteligencia Artificial Capítulo I Agentes inteligentes
Un agente inteligente Procesos INTERNOS ENTRADAS Conoce Sensor del ambiente Comprensión/ intencionalidad Vé Oye Toca Gusta Huele Razona Comportamiento SALIDAS
Tipificando a un agente inteligente SENSORES PERCEPCIONES AMBIENTE AGENTE ? ACCIONES EFECTORES
Qué es un agente inteligente • Un agente inteligente es cualquier cosa que pueda • percibir un mundo perceptual en que esté anidado (“ambiente”) mediante SENSORES y • actuar sobre ese mundo mediante EFECTORES (o actuadores) • sinónimo de ambiente es “espacio de problema” • sinónimo de agente inteligente es “operador que transforma un input en output dentro del espacio de problema” • META de la IA Diseñar un agente inteligente/racional que opere o actúe adecuadamente en sus ambientes. • Discusión sobre “adecuadamente” • Fijar alguna medida de “adecuadamente” (buen éxito) • Tener en cuenta el PRR Principio de Racionalidad Restringida de Herbert Simon
PRR (Herbert Simon) • El Principio de la Racionalidad Restringida alega que la racionalidad óptima ideal NO es el buen éxito perfecto. • Ningun ser humano apela a una mayor racionalidad que justo la necesaria para sus fines prácticos. • Las limitaciones de un agente • con los SENSORES que tiene • con los EFECTORES que tiene y • con la POTENCIA COMPUTACIONAL • disponible y • (en algunos casos) óptima económica • conducen a que la racionalidad ideal sea • imposible e • impráctica.
Algo más (Herbert Simon) • La razón es solamente un instrumento porque • no nos puede predecir hacia donde ir - no nos propone metas • a lo sumo nos ayuda a decidirnos cómo llegar a una meta (a través del análisis de medios y fines)
Agentes Racionales Racionalidad e Inteligencia
Qué es un agente racional • El que actúa maximizando el valor esperado de la medida de buen éxito (función de utilidad) en el logro de su meta • Racional no es omnisciente • Racional no es clarividente • Racional ideal en conflicto con el PRR
Racionalidad • Satisfacción de restricciones • Depende de • LA SECUENCIA DE PERCEPCIONES - TODO LO QUE EL AGENTE HA PERCIBIDO HASTA AHORA (GESTIÓN DE LA MEMORIA). • No se puede criticar a un agente por no saber lo que nunca supo • LA MEDIDA DE BUEN ÉXITO ELEGIDA • Función de utilidad • CUÁNTO CONOCE EL AGENTE DEL AMBIENTE EN QUE OPERA • Lista de hipótesis de cómo es el mundo • LAS ACCIONES QUE EL AGENTE ESTÉ EN CONDICIONES DE REALIZAR
Grado de Racionalidad - Nivel de Conocimiento - Newell • Grado de racionalidad grado con el cual el agente racional maximiza su medida de buen éxito en lograr una meta, sujeta a su disponibilidad de • sensores, efectores, potencia de cómputo y conocimiento internalizado. Allen Newell define el nivel de conocimiento por el número de reglas usadas respecto de su disponibilidad total de reglas. Ningun robot es responsable por no usar reglas que no conoce. …a un termostato le han dado dos reglas y las usa…
AGENTE INTELIGENTE IDEAL • El agente inteligente ideal es el que, para cualquier secuencia arbitraria de percepciones, logre con su ACCION maximizar la medida de su buen éxito. • Para ello usa • conocimiento interiorizado • secuencia de percepciones
Agentes autónomos • Son agentes autónomos los que no se guían por reglamento externo alguno.
Agentes Racionales y problemas Complejidad y racionalidad
P, NP, NP completo, NP duro • P. Son problemas que se pueden resolver en tiempo polinómico (lo cual significa rápido). Son muy frecuentes. Son P los que tienen tiempos de ejecución O(n) y O(log n) • NP. Un problema es NP si se puede verificar rapidamente (esto es, en tiempo polinómico) que la solución hallada es correcta (aunque haya sido complicadísimo hallar dicha solución). NP se refiere a “tiempo polinomial no-determinístico” donde la voz “no-determinístico” significa en la práctica “obtenida por adivinación”. Si alguien adivina alguna solución, es rápido verificar si es correcta como solución. • No se ha podido probar que un arbitrario problema NP se pueda reducir a P, lo cual lleva al tema de la clase de problemas NP-duros. • La subclase “de problemas NP-completos” se interpretan como que la voz “completo” indica el ejemplo más difícil de resolver dentro del tipo de problema.
Teoría de la completitud NP Problemas NP-duros. Si fuesen polinómicos se verificaría P = NP. Algunos problemas, como quizás el clásico del viajante de comercio, es probable que sean imposibles de resolver en cualquier computadora arbitraria (se trata de un problema NP-duro, hasta donde se conoce). Se lo debe resolver, p. ej., de forma aproximada y no exacta, o usando heurísticas. • De ello se deduce que • ya sea la inteligencia natural • o la inteligencia artificial NO son ilimitadas en sus capacidades. • De ello se vuelve a deducir que la racionalidad práctica resulta estar restringida. • Nadie debe esmerarse por aplicar la racionalidad más allá de sus necesidades prácticas. PRR • Caso límite el termóstato con sus dos reglas - Alto nivel de conocimiento.
Agentes Racionales Percepciones y acciones
Mapeo idealpercepciones acciones • El diseño o mapeo ideal especifica qué acciones debe encarar el agente ideal en respuesta a cualquier secuencia arbitraria de percepciones • Se concreta con una tabla real o virtual • Ejercicio de la racionalidad • Sandwich Percepciones Razonamiento Acciones
Funciones y programas de agentes • El agente queda completamente especificado con la función del agente que mapea lo que describe la ecuación • a = f (P,M,A) • sobre todo el componente principal a = f (P) • en principio uno puede suministrar cualquier secuencia perceptual posible para ver qué sucede - una tabla que resuma esa información podría ser inmensa • El programa de agente trata de implementar la función de agente en forma concisa (ejemplo: cálculo de la raiz cuadrada en una calculadora de bolsillo) • Un programa de agente toma una percepción singular como input y mantiene el estado interno
PaMA Estrategia de “divide y vencerás” • a = f(datos) • a = f(P,M,A) • Ejemplo - Piloto automático (taxista reemplazado por un agente inteligente ) • Percepciones ?? • acciones ?? • Metas ?? • Ambiente ??
PaMA • Para identificar a un agente debemos analizar su PaMA: Ejemplos de descripciones PaMA de un dado agente típico P-percepción a-acción M-meta A-ambiente
Análisis PaMA • En cualquier algoritmo aplicado a la IA debemos reconocer cómo cada parte contribuye a dicha meta. • Analicemos las máquinas (limitadas) de la IA como agentes inteligentes. • La meta planteada por la medida del buen éxito de ese agente suele ser combinación de varias submetas. • El análisis PaMA es un ejemplo de • la estrategia general de la ingeniería de “dividir para conquistar” • P+a+M+A cada sumando es más fácil que la suma ponderada. • la aplicación del ANÁLISIS DE REQUISITOS , que resuelve un problema analizando qué es obtenible como input y qué es deseado como output. • Otro Ejemplo: al analizar un sistema de imágenes por satelite, • percepciones: pixels de intensidad y longitud de onda variables • acciones: mover la cámara, cambiar el filtro, imprimir información • metas: identificación cercana a la realidad de todos los objetos de la imagen • ambiente: imágenes distorsionadas provenientes de una cámara de satelite.
Taxista Robotpiloto automático • Percepciones • video • acelerómetro, instrumental del tablero • sensores del motor • teclado • acciones • gestión del volante • acelerar y frenar • bocina • hablar/dibujar • Metas • seguridad, llegar a destino, maximizar ganancias, obedecer las leyes, satisfacción del cliente • Ambiente • calles urbanas, avenidas, tráfico, peatones, clima, tipo de cliente
Estructura de un agente inteligente • ESQUEMA GENÉRICO DE UN AGENTE: • Desde un punto de vista estricto, no es necesario que el agente guarde en su memoria las percepciones entrantes dependería del dominio. Un dominio es un fragmento del mundo acerca del que deseamos adquirir conocimiento. • El esquema del agente no incorpora la medida de buen éxito en su meta se entiende que ella está siendo aplicada externamente. function Skeleton-Agent(percept) returnsaction static:memory, the agent's memory of the world memory¬ Update-Memory(memory, percept) action¬ Choose-Best-Action(memory) memory¬ Update-Memory(memory, action) returnaction
Estructura de los Agentes Racionales Tipos de Agentes
Tipos de Agentes Agentes sin información actualizada de su mundo • Tabla • encontrar la acción siguiente usar una tabla en memoria del tipo “secuencia de percepciones/acción”. Sería una tabla demasiado voluminosa para repetir la acción ya experimentada antes. • Agentes reflejos con un único estado (simples) • se basan en reglas condición/acción y se implementan con un sistema de PRODUCCIÓN. Carecen de memoria referida a estados pasados del mundo.
Lo más sencillo:DISPONER DE UNA TABLA • ¿Por qué fracasa el ideal de disponer de una tabla de consulta? • Esta arquitectura tiene los siguientes inconvenientes • tamaño excesivo (no factible) • falta de adaptación. • ¿Qué tamaño tendría que tener la tabla? (Caso límite, el ajedrez) • El agente ¿podrá aprender de sus errores? • ¿De dónde provendría dicha table en primera instancia? function Table-Driven-Agent(percept) returnsaction static:percepts, a sequence, initially empty table, a table indexed by percept sequences, initially fully specified append percept to the end of percepts action¬ LookUp(percepts, table) returnaction
cambios Reglas Si- Entonces Qué acción debo hacer en este momento conocimiento Efectores Agente reactivo simple Agente Sensores Cómo es el mundo en este momento Ambiente
¿Qué es un agente reactivo simple? • Las reglas condición-acción permiten establecer la conexión entre percepción y acción. • Se indica el estado interno, único en un momento dado del proceso de decisión. • Se indica la base de conocimiento en forma de reglas de producción. • Programa del agente: • Interpret-input genera una descripción abstracta del estado mostrado por la percepción • Rule-match proporciona una regla del conjunto que satisface la percepción function Simple-Reflex-Agent(percept) returns action static:rules, a set of condition-action rules state¬ Interpret-Input(percept) rule¬ Rule-Match(state, rules) action¬ Rule-Action[rule] returnaction
Tipos de Agentes Bien informados de lo que pasa en su mundo • Agentes con memoria • con un estado interno que sirve para seguirle la pista a los estados pasados de su mundo. • Agentes focalizados en encontrar la meta • además de disponer de información sobre el estado, tienen información sobre situaciones deseables para alcanzar la meta. Lógicamente, agentes de este tipo tienen bajo consideración eventos del futuro. • Utilidad focalizados en mejorar la utilidad de sus acciones • basan su decisión en la teoría axiomática clásica de la utilidad para actuar racionalmente.
Reglas Si - Entonces Qué acción debo hacer en este momento conocimiento ¿Qué es un agente bien informado? Agente Sensores Estado Cómo evoluciona el mundo Cómo es el mundo en este momento Qué producen mis acciones Ambiente Efectores
Agentes bien informados • La actualización del estado interno requiere dos tipos de conocimiento codificado • conocimiento acerca de la forma en que el mundo cambia, independientemente de las acciones del agente. • conocimiento acerca de la forma en que el mundo cambia con motivo de la acción del agente • Pero el conocimiento del estado interno no siempre es suficiente • al elegir entre dos rutas alternativas (en una intersección ¿girar o no girar el volante del coche?) no se alcanzará el objetivo final • pues se requiere conocer la meta a lograr para finalizar la tarea con éxito function Reflex-Agent-With-State(percept) returns action static:rules, a set of condition-action rules state, a description of the current world state¬ Update-State(state, percept) rule¬ Rule-Match(state, rules) action¬ Rule-Action[rule] state¬ Update-State(state, action) returnaction
Reglas Si - Entonces Qué acción debo hacer en este momento conocimiento ¿Qué es un agente orientado a metas? Agente Estado Sensores ¿Cómo evoluciona el mundo? Cómo es el mundo en este momento ¿Qué producen mis acciones? ¿Qué sucedería si emprendo la acción A? Ambiente Efectores
Agentes basados en Metas • Razonando acerca de acciones • un agente reflejo solo actúa basado en conocimientos precomputados (reglas) • la búsqueda y la planificación ayudan a razonar acerca de qué acción logra la meta • el agente es menos eficiente pero más adaptativo y flexible • Qué argumentar acerca de acciones alternativas que llegan a la meta • hay que maximizar la utilidad de las acciones, esto es, elegir aquella que logra lameta mejor de todas.
Arquitectura General de Agentes basados en Metas Input percept state¬ Update-State(state, percept) goal¬ Formulate-Goal(state, perf-measure) search-space¬ Formulate-Problem (state, goal) plan¬ Search(search-space, goal) while (plan not empty) do action¬ Recommendation(plan, state) plan¬ Remainder(plan, state) output action end • Los agentes simples no tienen acceso a su medida de buen éxito • En ese caso el diseñador elige la meta y la incorpora por diseño a su agente • Similarmente, los agentes tontos no pueden formular su propio problema • en cuyo caso dicha formulación tambien se debe incorporar al diseño • El bucle “while” (mientras) - ver arriba - es la fase de ejecución de la conducta de este tipo de agentes • Nótese que en esta arquitectura se sobreentiende que para la fase de ejecución no importa monitorizar el ambiente.
UTILIDAD ¿Soy feliz así? ¿Qué hago ahora? conocimiento ¿Qué es un agente basado en utilidad? Agente Estado Sensores ¿Cómo evoluciona el mundo? Cómo es el mundo en este momento ¿Qué producen mis acciones? ¿Qué sucedería si emprendo la acción A? Ambiente Efectores
Agentes basados en Utilidad • Función Utilidad • es un mapeo de estados bajo la forma de números reales • lleva a decisiones racionales en dos tipos de situaciones • evaluación de compromisos entre metas en conflicto • evaluación de metas en conflicto
Agentes basados en utilidad • Las metas no bastan para generar una conducta de alta calidad. • Las metas permiten establecer una distinción entre estados “felices” e “infelices”. • Si se prefiere un estado en lugar de otro, se dice que ese estado ofrece mayor “utilidad” al agente. Utilidad • Función que caracteriza el grado de satisfacción • En temas venideros se mencionará frecuentemente el PRINCIPIO DE MAXIMA UTILIDAD ESPERADA
Ambientes Características y tipos
Propiedades de los Ambientes • Accesible/Inaccesible • Si los sensores proporcionan todo lo que hay que saber sobre el estado completo del ambiente - necesario para elegir una acción - entonces el ambiente es accesible al agente. Esos ambiente resultan convenientes, ya que liberan al agente de la tarea de mantener actualizado su inventario del mundo. • Determinístico/No-determinístico (estocástico) • Si el estado siguiente del ambiente está determinado plenamente por el estado presente del mismo, y por la acción del agente - se trata de un ambiente determinístico. Así el agente escapa de la incertidumbre. • Episódico/No-episódico • Un ambiente episódico implica que los episodios siguientes no dependen de las acciones que ocurrían en episodios previos (como en las clásicas cadenas de Markov). Esto permite al agente que no se preocupe por la planificación de lo que pueda ocurrir.
Propiedades de los Ambientes (2) • Estático/Dinámico • Será estático todo ambiente que no cambie mientras el agente está “pensando”. No tiene importancia el tiempo que se usa en pensar y no necesita monitorizar el mundo mientras piensa. El tiempo carece de valor mientras se computa una buena estrategia. En otro caso será dinámico. • Discreto/Continuo • Discreto - con escaso número de percepciones y acciones en el ambiente. • Continuo - en otro caso. • Sin adversario/con adversarios racionales • Sin adversario - ausencia de otros agentes racionales adversarios: la consecuencia es que el agente se libera de competir con dichos adversarios en el mismo juego. • Los ambientes ingenieriles suelen ser sin adversario. • Los ambientes sociales y económicos aumentan en su complejidad por la presencia de interacciones entre uno o más adversarios (por ejemplo en la Bolsa).
Tipos de ambientes y sus características • Solitario • Taxi • Accesible ?? • Determinístico ?? • Episódico ?? • Estático ?? • Discreto ??
Tipos de ambientes y sus características • Solitario sí - sí - no - sí - sí • Taxi no - no -no - no - no • Accesible • Determinístico • Episódico • Estático • Discreto
Ambientes en Internet • e_mail • Grupos de noticias • WWW • FTP • Juegos en línea • Foros • Buscadores con diversos agentes • Ambiente apto para minería de datos • Bibliotecas virtuales (p.ej., de IA)
Broker-Corredor de comercio---Spider-Buscador, literal araña.
Programa básico para el ambiente procedure Run-Environment(state, Update-Fn, agents, termination) input:state, the initial state of the environment Update-Fn, function to modify the environment agents, a set of agents termination, a predicate to test when we are done repeat for each agent in agents do Percept[agent] ¬ Get-Percept(agent, state) end for each agent in agents do Action[agent] ¬ Program[agent](Percept[agent]) end state¬ Update-Fn(actions, agents, state) untiltermination(state) • Programa básico para simular ambientes • proporciona las percepciones a los agentes anidados en ese ambiente • absorbe una acción de cada agente en la unidad de tiempo • actualiza el ambiente cada unidad de tiempo
Simulador de ambiente al tanto de las medidas de buen éxito de los agentes function Run-Eval-Environment(state, Update-Fn, agents, termination, Performance-Fn) returns scores local :scores, a vector the same size as agents, initially all 0 repeat for each agent in agents do Percept[agent] ¬ Get-Percept(agent, state) end for each agent in agents do Action[agent] ¬ Program[agent](Percept[agent]) end state¬ Update-Fn(actions, agents, state) scores¬ Performance-Fn(scores, agents, state) untiltermination(state) return scores • Casi siempre, los agentes se han diseñado para satisfacer una cierta clase de ambiente • medición de buen éxito en ese ambiente, definido por un estado inicial singular y una función de actualización particular.