Download

1 / 34
340 likes | 460 Views
Multi-vehicle Cooperative Control Raffaello D’Andrea Mechanical & Aerospace Engineering Cornell University. Progress on RoboFlag Test-bed MLD approach to Multi-Vehicle Cooperation Obstacle Avoidance in Dynamic Environments Path Planning with Uncertainty. OUTLINE.

E N D
Multi-vehicle Cooperative ControlRaffaello D’AndreaMechanical & Aerospace Engineering Cornell University • Progress on RoboFlag Test-bed • MLD approach to Multi-Vehicle Cooperation • Obstacle Avoidance in Dynamic Environments • Path Planning with Uncertainty OUTLINE
RoboFlagAn experimental platform for multi-vehicle cooperative control in uncertain and adversarial environments
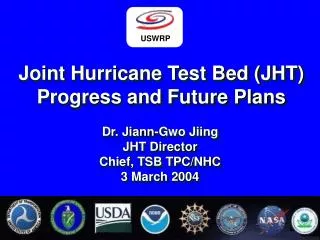
SYSTEMS OF INTEREST CENTRALCONTROL SENSE GLOBALSENSING PROCESSING HIGH LEVELDECISION MAKING COMMS COMMS COMMUNICATIONS NETWORK COMMS COMMS COMMS COMMS COMMS ACTUATE COMMS HUMANINTERFACE LOW LEVELCONTROL HIGH LEVELCONTROL VEHICLE SENSE
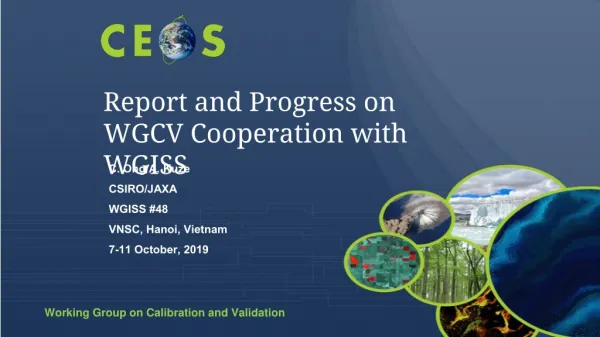
RoboFlag System Vision computer Arbiter Overhead cameras Computers for each entity . . . . . RF transceiver
SOFTWARE ARCHITECTURE LOW LEVEL CONTROL INTERFACE WIRELESSINTERFACE LOCAL MACHINE VISIONBASEDGLOBAL ANDLOCAL SENSING VEHICLEHIGH LEVELCONTROL VEHICLEHIGH LEVELCONTROL VEHICLELOW LEVELCONTROL VEHICLELOW LEVELCONTROL COMMUNICATIONS NETWORKSIMULATOR GLOBAL ARBITER HUMANINTERFACE CENTRALCONTROL
HARDWARE ARCHITECTURE WIRELESSHARDWARE HARDWARE PORT INTERFACE ANDARBITRATIONCOMPUTER MACHINE VISIONCOMPUTER HARDWARE PORT WIRELESSHARDWARE LOCAL LOCAL VEHICLE(S)HIGH LEVELCONTROL COMPUTER VEHICLE(S)HIGH LEVELCONTROL COMPUTER VEHICLE HUMAN INTERFACECOMPUTER CENTRAL CONTROLANDCOMMUNICATIONS NETWORKCOMPUTER VEHICLE HUMAN INTERFACECOMPUTER
SIMPLE COMMUNICATIONS NETWORK MODEL: Bi,j data units buffer 0 Bi,j data units buffer Li,j -1 Bi,j data units buffer Li,j Ui Uj
People • Michael Babish (Research Support) • Andrey Klochko (Programmer) • JinWoo Lee (Post-Doc) • 30 UG and M.Eng. students Shared platform with DARPA MICA
The RoboFlag Drill: Matt Earl Defenders Attackers Constraints • Defender objective: pick u(t) to minimize number of attackers within defense zone at time T. • Attacker objective: pick v(t) to maximize number of attackers within defense zone at time T.
Problem: Consider the RoboFlag Drill with the following assumptions • irrational attackers (drones) • full and perfect information • collisions are ok • simple 2nd order defender dynamics Model as a discrete time mixed logical dynamical (MLD) system (Bemporad & Morari 1999) • linear dynamics • logical rules • inequality constraints
Defenders dynamics constraints (must not enter defense zone) intercept region intercept region (dotted region in figure above)
Attackers auxiliary binary variables dynamics
Optimal control policy we convert the system into MLD form using HYSDEL (Torrisi, Bemporad, and Mignone 2000) this can be written as a mixed integer linear program (MILP)
Results • MILP problem: 4040 integer variables, 400 continuous variables,13580 constraints • CPLEX solves in 244 seconds on Linux PIII 866MHz
Evaluation of this approach for cooperative control Good • easy to model complex systems • easy to formulate complex tasks via a cost function to minimize and constraints to be satisfied • handles very general constraints • codes available for solving mixed integer programs • gives optimal strategy Bad • computationally intensive • constraints only enforced at discrete times. • does not exploit structure
A new approach to reduce computation Exploit structure of the problem by considering the discrete and continuous parts separately.
Form an intercept tree Exploit motion primitives - Prune intercept tree - Find feasible paths within tree
Path Planning under Uncertainty:Myungsoo Jun Capture uncertainty in information with a probabilistic approach MAIN IDEAS: • Construction of probability map from available data • Measurement data • A priori statistics of environments • Convert the probability map to a directed graph • Path planning by solving shortest path problem in digraph
Probability Map Building • Measurement update by measured data sensor characteristics • Time update by a priori statistics of environment environment statistics • Map building From this can obtain probability distribution that at least one opponent is at a certain location
Conversion to Digraph 0.015 0.02 0.013 0.02 0.015 0.013 0.015 0.01 0.02 0.015 0.01 0.013 0.013 0.013 0.001 0.001 0.013 0.001 ProbabilityMap Digraph
Examples Dynamic Replanning Case with Multiple Vehicles
Contribution and Future Work Contribution: • Building a probability map in uncertain dynamic environments • Path planning of multiple vehicles in uncertain dynamic environments based on probability maps • Integrating map building and path planning Future Work: • Consideration of time and velocity in path planning for multiple vehicles • Consideration penalty for frequent acceleration and deceleration • Improving map building computation for real-time application
Obstacle Avoidance in Dynamic Environments: Pritam Ganguly Objective: Computationally fast algorithms for path planning in multi-agent adversarial environments with delayed information. APPROACH • Game Theoretic:Avoiding arational adversary in a delayed • environment can be modeled as anon-cooperative imperfect • information game . Trajectory generation is an outcome of • such an approach. • Randomized Algorithm:This algorithm uses an existing • trajectory generation routine to generate feasible paths in the • presence of obstacles. One way to incorporate the effect of delay • is to associate with each obstacle a reachability regime over the • delayed steps. Frazzoli, Dahleh, and Feron
Randomized Algorithm Terminology: • Primary Node: An equilibrium configuration belonging to the state-space of the agent. • Secondary Node: An element of the state space of the agent which lies on the path from the initial point to a primary node.
Randomized Algorithm Main Idea: (Frazzoli,Dahleh & Feron ‘00) • The main idea is to search for random intermediate points in the state-space which might generate a feasible path to the destination. A feasible path being the one without any • collisions. • Among all the feasible paths the one with the lowest cost (eg. time) is then chosen. • The underlying assumption in using this algorithm is that one already has a way of generating trajectories in the absence of obstacles.
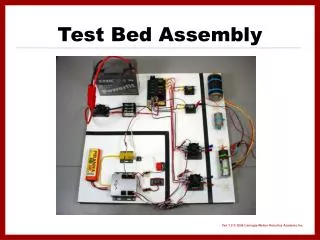
Initialize tree with starting position Randomly generate primary node and also a start point from the already generated tree Is Path(start,primary) feasible No yes Generate random secondary points and add them to the tree No Is Path(secondary, destination) feasible yes Feasible Path found, update costs Randomized Algorithm Main Idea and Implementation: • This algorithm is probabilistically complete: with probability one, it returns a feasible path if there exists one. • Instead of using a tree data structure, use a grid data structure which takes a large storage space but has faster access time.
Future Work • Implement the randomized algorithm framework • for multiple agents in a centralized fashion, which would • be a relatively easy extension to the present • algorithm by increasing the state-space dimension. • Develop a protocol enabling the decentralization • of the above computation, and prove that the protocol achievesthe desired objective.
Atif Chaudhry • Survey published research on multiple vehicle control • Investigating relationship between RoboFlag framework and desired military capabilities of autonomous vehicles