Download
1 / 1
20 likes | 164 Views
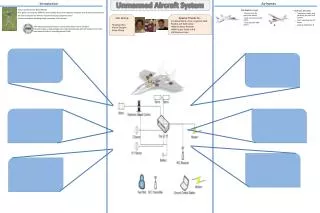
Introduction. Unmanned Aircraft System. Airframes. UAV is an U nmanned A erial V ehicle Our goal is to setup two different plane configurations with Paparazzi autopilot and fly them autonomously Do this in conjunction with two separate Aerospace Engineer teams

E N D
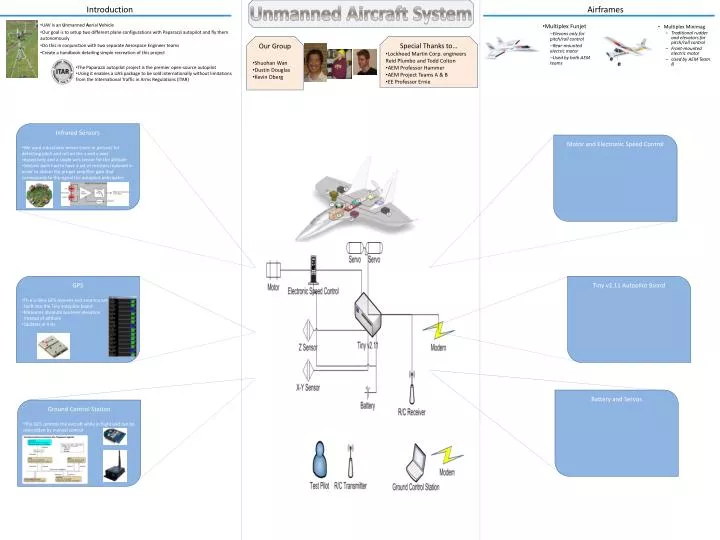
Introduction Unmanned Aircraft System Airframes • UAV is an Unmanned Aerial Vehicle • Our goal is to setup two different plane configurations with Paparazzi autopilot and fly them autonomously • Do this in conjunction with two separate Aerospace Engineer teams • Create a handbook detailing simple recreation of this project • Multiplex Funjet • Elevons only for pitch/roll control • Rear-mounted electric motor • Used by both AEM teams • Multiplex Minimag • Traditional rudder and elevators for pitch/roll control • Front-mounted electric motor • Used by AEM Team B • Our Group • Shuohan Wan • Dustin Douglas • Kevin Oberg • Special Thanks to… • Lockheed Martin Corp. engineers Reid Plumbo and Todd Colton • AEM Professor Hammer • AEM Project Teams A & B • EE Professor Ernie • The Paparazzi autopilot project is the premier open-source autopilot • Using it enables a UAS package to be sold internationally without limitations from the International Traffic in Arms Regulations (ITAR) • Infrared Sensors • We used a dual-axis sensor (seen in picture) for detecting pitch and roll on the x and y axes respectively and a single-axis sensor for the altitude • Sensors each had to have a set of resistors replaced in order to obtain the proper amplifier gain that corresponds to the signal the autopilot anticipates • Motor and Electronic Speed Control • GPS • Th e U-Blox GPS receiver and antenna are • built into the Tiny autopilot board • Measures absolute sea level elevation • instead of altitude • Updates at 4 Hz • Tiny v2.11 Autopilot Board • Battery and Servos • Ground Control Station • The GCS controls the aircraft while in flight and can be overridden by manual control