Download

1 / 39
400 likes | 781 Views
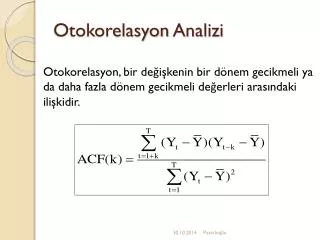
Araç Dinamiği- 14 Geçici Rejim+ Kararlılık Analizi. Dr S. Çağlar Başlamışlı. Basit Taşıt Modeli. r. b. a. İvmeler. Taşıt üzerine fikslenmiş koordinat sisteminde ivme bileşenlerinin bulunması. Hareket Denklemleri.

E N D
Araç Dinamiği- 14Geçici Rejim+Kararlılık Analizi Dr S. Çağlar Başlamışlı
Basit Taşıt Modeli r b a
İvmeler Taşıt üzerine fikslenmiş koordinat sisteminde ivme bileşenlerinin bulunması
Hareket Denklemleri • Sabit boylamasına hız kabulü sonucu elde edilen hareket denklemleri:Fy = m(V + Ur) = Fyf+ FyrMz = Iz r = Fyfa - Fyrb o o b a
Lineer Lastik Modeli • Fyf = C f f • Fyr = C r r vx V r vy b a Lastik merkezinin hız bileşenleri Lastik yanal kayma açısı
Koordinat Değişimi • Gövde sabit koordinat sisteminden dünya sabit koordinat sistemine geçiş Dünya Sabit Gövde sabit earth fixed Ub body fixed Vb
Kararlılık Analizi • Kütle-yay-sönümleyici sistemi: • x1 = x x2 = x A
Kararlılık Analizi • A matrisinin özdeğerleri sistemin kararlılığını belirlemektedir Karakteristik denklem Özdeğerler
Kararlılık Analizi • kritik sönümlemeaşırı sönümlemeaz sönümleme x x x x x x
Bisiklet Modelinin Kararlılığı • A matrisinin özdeğerleri bisiklet modelinin kararlılığı (geçici rejimde vereceği tepkileri niteliği) hakkında bize bilgi verecektir
Bisiklet Modelinin Kararlılığı Karakteristik denklem:
Bisiklet Modelinin Kararlılığı Sistemin kararlı olabilmesi için tüm polinom katsayılarının pozitif olması şarttır:
Bisiklet Modelinin Kararlılığı • Negatif olabilecek terim sadece son terim. Denklem yeniden düzenlendiğinde son terim:
Bisiklet Modelinin Kararlılığı • Negatif olabilecek terim sadece son terim. Denklem yeniden düzenlendiğinde son terim:
Bisiklet Modelinin Kararlılığı Understeer. Sistem Hızdan bağımsız olarak hep kararlıdır Oversteer. Sistem kararlılığı hıza bağımlıdır
Açısal Hız Kazancı critical speed neutral steer oversteer 1/L understeer equal characteristic speed speed U
Yanal İvme Kazancı critical speed neutral steer (quadratic) Lateral acceleration gain oversteer understeer (Uchar)2/L characteristic speed speed U
İleri kararlılık analizi • Römorkun traktör kararlılığı üzerine etkisi? • Devrilme kipinin kararlılık analizine dahil edilmesi?
Römorkun traktör kararlılığı üzerine etkisi articulation angle y trailer tractor
Basit Traktör + Römork Modeli _ x2 5th wheel 1Iz , m1 yt 2Iz yr yf _ b1 x1 b2 a1 L
Steady State Analizi • Steady state dönme: sabit yanal ivme 2Yp U Fyt 1Yp Yanal lastik kuvvetleri Fyr Fyf
Steady State Analizi • 5. tekere göre moment dengesi: • Trailer kuvvet dengesinden: Trailer eksenine dik 5. teker üzerine binen kuvvet
Steady State Analizi • 5. tekerin traktör üzerine etki ettirdiği kuuvet1Yp = - 2Ypcos • Moment dengesinden Traktör arka aks yanal kuvveti
Steady State Analizi • Kuvvet Dengesinden, traktör ön aks yanal kuvveti • Her bir lastiğin yanal kayma açısı: = Yt, Yf, or Yr
Articulated Vehicles-SS Turning Traktör arka lastik yanal kayma açısı • :traktör gövdesininkayma açısı (V/U) Traktör ön lastik yanal kayma açısı Trailer arka lastik yanal kayma açısı
Steady State Analizi • Bisiklet modeliyle analoji kurulursa • Traktör:Trailer: b1 L 2 3 1 b2
Steady State Analizi K = rad/g. ay = yanal ivme Traktör-trailer kararlılığını Etkileyen önemli bir etken: 5. Teker açısı kararlılığı
Tractor – Trailer UndersteerAnalizi • K and KTnin değişik durumları kararlılık analizi yapılabilir 1. K > 0, KT > 0 K > 0, KT > 0 U U
Tractor Understeer– Trailer Oversteer Analysis 2. K > 0, KT < 0 K > 0, KT < 0 UC U
Tractor oversteer– Trailer Understeer Analysis • Tractor oversteer & trailer understeer. K < 0 , KT > 0 Uc U
Tractor – Trailer Understeer Analysis K < 0, KT < 0 • olması durumunda jacknifing tipi kararsızlık oluşur. K < 0, KT < 0 Uc U
Tractor – Trailer Understeer Analysis K < 0, KT < 0 • olması durumunda trailer swing tipi kararsızlık oluşur. K < 0, KT < 0 Uc U
Traktör Kararlılığı • Traktör ya da traktör + römork sisteminin otoban şartlarında understeer oversteer ve devrilme analizleri bu yansılardaki modellerle yapılabilir; • Traktörün tarla/arazi şartlarında çok düşük hızlarda yana devrilmesi, şahlanması, yokuş aşağı kayması/devrilmesi gibi durumlar çözümlü problemler dosyasından incelenebilir.