Download
1 / 33
330 likes | 349 Views
Detailed discussions from the nEDM Collaboration Meeting focusing on 3He Injection Coils optimization for improved field polarization and potential issues encountered.

E N D
3He Injection Coils Christopher Crawford, Genya Tsentalovich, WangzhiZheng, Septimiu Balascuta, Steve Williamson nEDM Collaboration Meeting 2011-06-07
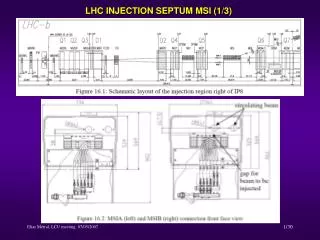
Injection beamline magnetic elements ABS TR3a Helmholtz coils (outer TR3b coils not in model) 77K sheild 4K shield TR2b coil at 300K TR2a coil at 300K TR1b coil at 77K TR1a coil at 4K Injection Volume trouble regions
Previous spin precession simulations doubling the injection field improves to 95% polarization Wangzhi Zheng
Old approach PROBLEMS 1. The magnetic field from ABS quadrupole on μ-metal shield is about 2G. 2. The solenoidal field near the ABS exit is too small to preserve polarization. 3. The field is less than Earth field outside the μ-metal shield (active shielding doesn’t shield the external fields). 4. The direction of polarization is wrong before the entrance into cosθ coil. ABS quadrupole
Magnetic field direction H The up- and downstream coils shift the direction of the field making it more longitudinal (30° instead of 45°). 45° 45° H
Placement of coils – gap between coils T1a/b coil @ 4K T2a/b coil @ vacuum preferably outside vacuum (smaller diameter stub)
Continuity of field with gap in coil surface • Gap must be at constant potential (no wires) • Taper field down to zero in a “buffer region” • Potential • Field 10-8 G <1 mG 1 G
B-field along ABS axis Field rotates after taper Wangzhi Zheng
Ideal field: Taper and Rotate from 5 G to 50 mG • Old version: calculate taper on single line using analyticity • Rotation: generalize approximation to include transverse component
B-field in TR1 region – optimized taper 1 G Bz(z) n=1 n=-10 n=10 n=-1 50 mG Bx(z) z Edge of cos theta coil End of TR1 region
B-field in TR1 region – optimized rotation 1 G Bz(z) m=5 m=2 50 mG Bx(z) m=1 z Edge of cos theta coil End of TR1 region
Adiabaticity parameter – optimized taper n=-1 n=-10 n=10 n=1
Adiabaticity parameter – optimized rotation • Adiabaticity parameter: 1/10 everywhere m=1 m=2 m=5
Tapered rotated field in T1a/b region Calculation vs.Simulation tapered flux 50mG flux U=0 tapered flux
Taper-rotated / linear rotated combination • Planar geometry in T1a/b region • Cylindrical geometry in T2a/b region • Tuned to zero net flux out of gap
Tapered Cylindrical Double Cos Θ Coil • Field tapers from 5 G to 40 mG in 2m • Segmented 6x current between coil • Merges into field of B0 coil • Inner/outer coils combined intosingle winding 71 ‘mG 50 (center) total taper guide taper (edge) 25 B0 taper 0 0 25 50 75 100 cm Guide field windings shown with 25 turns
Construction of Surface Current Coils • Designed using thescalar potential method • FEA simulation of windings • Staubli RX130 robot to construct coil • A series of rigid links connected by revolute joints (six altogether). • The action of each joint canbe described by a singlescalar (the joint variable),the angle between the links. • Last link is the end effector. • Joint variables are:J0,J1,J2,J3,J4,J5
Link Frames • We can imagine attaching a cartesian reference frame to each link. • We might call the frame attached to the first link the inertial frame or the lab frame (the first link is fixed wrt the lab). • The frame attached to the last link is the end-effector frame.
Coordinate Transforms • Given the coordinates of a point in one frame, what are its coordinates in another frame? • The relationship between the end-effector frame and the inertial frame is of particular interest. (The location of the drill is fixed w/r the end-effector frame. The location of the electroplated form is fixed w/r the inertial frame). • Generally, six independent parameters are needed to relate one frame to another (3 to say where the second origin is, 3 to orient the second set of axes). • For the link frames, the position of each origin is flexible, so the relation can be specified with 4 parameters, one of which is the joint variable. These are the DH parameters.
DH Parameters / Homogeneous Transform Matrix • To repeat: the relationship between link frames can be characterized by 4 parameters, one of which is the joint variable. The other 3 are fixed, and relate to the size and placement of the links. • Using the fixed DH parameters and the joint variable, we can compute a transformation matrix needed to translate one link's coordinates into the adjacent link's coordinates. • T(J) is a 4x4 matrix of the following form: • i' j' k' T ( 0 0 0 1 ) • We can compose transformations to relate any two frames.
Problem: Forward / Inverse Kinematics • With these concepts in place, we can address the following problem: • Given an actuation, determine the position and orientation (i.e., the pose) of some body fixed in the end-effector frame with respect to the inertial frame. • {J0, J1, J2, J3, J4, J5} -> {x, y, z, alpha, beta, gamma} • Solution: Build the transformation matrix for the given actuation and apply it to every point in the body. Alpha, beta and gamma can be compute directly from i', j’, k'. • Conversely: • Given a pose, find an actuation that will produce it.
Problem: Calibration • Finally, given many (Actuation, Pose) pairs, find a set of DH parameters for best fit. • For each actuation, take actual measurements of the end-effector's pose. • Pick a few points fixed with respect to the end-effector frame. • This is easy to see if we select P0=(0,0,0) P1=(1,0,0) P2=(0,1,0) P3=(0,0,1) • Randomly actuate the robot. • Measure the position of each point w/r the inertial frame using a FARO arm. • Recover the translation vector from FARO(0) • Recover rotation matrix (Euler angles) fromFARO(P1)-FARO(P0), FARO(P2)-FARO(P0), …
Positioning [Tooling] • While the location of the drill is fixed in the end-effector frame, we don't know its exact position. • If we know the precise position of some location on a flat surface, then we can know the precise distance of the drill tip from that point using the laser distance meter. 60000 RPM 10 um accuracy
Geometry Capture/Wire Placement • Once the robot is calibrated (that is to say, we know the pose of its end effector for any actuation), we can capture the geometry of the electroplated form using the laser displacement meter. • Coil Design: [Magnetic Scalar Potential Technique] • A digital representation of the form geometry. • A description of the field we desire within the form. • Feed output of COMSOL back to robot to drill windings on the form
Conclusion • New techniques • Rotating fields • Gap between current surface • Converging on designs for guide fields • Neutron guide • 3He injection tube • 3He transfer region • Developing the capability to construct coils • Robotic arm with • laser displacement sensor • high speed spindle