Download
1 / 38
390 likes | 661 Views
Sistemas de control TI-2233. Estabilidad, Lugar Geométrico de la raíces 7ª clase. Sistemas de control Estabilidad. Estabilidad de un sistema

E N D
Sistemas de control TI-2233 Estabilidad, Lugar Geométrico de la raíces 7ª clase
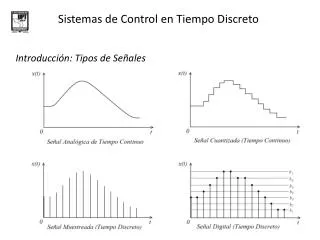
Sistemas de control Estabilidad • Estabilidad de un sistema • Un sistema es estable si la respuesta del sistema al impulso tiende a cero cuando el tiempo tiende a infinito. Si el sistema tiende a un valor finito diferente a cero, se puede decir que el sistema es críticamente o marginalmente estable. Una magnitud infinita hace a el sistema inestable.
Sistemas de control Estabilidad • Notas: • Si los todos los polos de la función de transferencia están en el lado izquierdo de plano-s entonces el sistema es estable. • Un sistema es críticamente estable si uno o más polos están en el eje imaginario del plano-s. • En el estudio de estabilidad sólo los polos de la función de transferencia son importante, los zeros son irrelevantes. • Los polos de un sistema son las raíces obtenidas de el denominador de la función de transferencia cuando es igualado a cero. Polinomio característico. • El concepto de estabilidad es aplicado a sistemas a lazo cerrado o a lazo abierto.
Sistemas de control Estabilidad • Criterio de estabilidad de Routh-Hurwitz El polinomio a(s) se dice Hurwitz si todas sus raíces tienen parte real negativa. Si es la función de transferencia de un sistema, entonces el sistema es estable si el polinomio d(s), conocido como el polinomio característico del sistema, es Hurwitz.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz Sirve para determinar si un polinomio a(s) es Hurwitz o no. • Considere el polinomio a(s) de grado n escrito en la forma donde los coeficientes son números reales. Se supone que es decir a(s) no tiene raíces en s=0. 2. Si alguno de los coeficientes es cero o negativo en presencia de al menos un coeficiente positivo, entonces el polinomio a(s) tiene raíces puramente imaginarias, o que tienen parte real positiva. En este caso a(s) no es Hurwitz.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz 3. Si todos los coeficientes son positivos (o todos negativos) y diferentes de cero, construya el siguiente arreglo
Sistemas de control Estabilidad Criterio de Routh-Hurwitz donde Se continua de esta forma hasta que la n-ésima fila del arreglo ha sido completada.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz El criterio de Routh-Hurwitz establece que el número de raíces de a(s) con parte real positiva es igual al número de cambios de signo de los coeficientes en la primera columna del arreglo. Entonces, el polinomio a(s) es Hurwitz si y solo si y todos los coeficientes en la primera columna del arreglo son positivos.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz ejemplo:
Sistemas de control Estabilidad Casos especiales del criterio de Routh-Hurwitz • El primer elemento de una fila es cero, y es el único elemento de la fila, o los demás elementos de la fila son diferentes de cero. En este caso, el cero es reemplazado por un número positivo muy pequeño y se continua con el cálculo del arreglo. Si el signo del coeficiente arriba del cero () en el arreglo es el mismo que el de abajo, entonces el polinomio a(s) tiene un par de raíces imaginarias. En caso contrario, esto es, si el signo del coeficiente arriba del cero () es diferente que el de abajo, entonces el polinomio a(s) tiene 2 raíces con parte real positiva.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz ejemplo:
Sistemas de control Estabilidad Casos especiales del criterio de Routh-Hurwitz 2. Si todos los coeficientes de una fila son cero, entonces el polinomio a(s) tiene raíces de igual magnitud y opuestas en el plano-s, esto es, 2 raíces de igual magnitud y de signo contrario, o 2 raíces imaginarias conjugadas. En este caso, el arreglo de los coeficientes puede ser completado formando un polinomio auxiliar con los coeficientes de la fila anterior y usando los coeficientes de la derivada de este polinomio en la siguiente fila. Las raíces de igual magnitud y opuestas en el plano s corresponden a las raíces del polinomio auxiliar.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz ejemplo: Polinomio auxiliar au(s) Fila de ceros Se remplaza la fila de ceros por la derivada del polinomio auxiliar.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz ejemplo:
Sistemas de control Estabilidad Criterio de Routh-Hurwitz El criterio de Routh-Hurwitz también puede usarse para estudiar la estabilidad relativa de un sistema; esto es, si el sistema es estable, qué tan cerca está de ser inestable. Nos interesa saber en este caso si el polinomio a(s) tiene raíces a la derecha de la línea s=-, donde es una constante. Para ello hacemos la substitución en a(s) y aplicamos el criterio de Routh-hurwitz al polinomio El número de cambios de signo en la primera columna del arreglo construido para es igual al número de raíces de a(s) a la derecha de la línea s=-.
Sistemas de control Estabilidad Criterio de Routh-Hurwitz Ejemplo: Hallar el valor de K para
Sistemas de control Estabilidad + - V(s) Y(s) Lugar Geométrico de la raíces (Root-locus) Utilizando los polos de la función de transferencia, el lugar geométrico de las raíces es el gráfico en el plano-s de la ubicación de los polos conforme K varia desde cero a infinito. El root-locus complementario es desde menos infinito a cero. Ejemplo:
Sistemas de control Estabilidad Lugar Geométrico de la raíces (Root-locus) Ejemplo (cont.):
Sistemas de control Estabilidad Si K>0, k=±1, ±2,… Si K<0, k=±1, ±2,… Construcción root-locus Si a lazo cerrado La ecuación característica debe ser igualada a cero
Sistemas de control Estabilidad Construcción root-locus Podemos re-escribir Obteniendo entonces: Debemos hacer lo mismo con los ángulos
Sistemas de control Estabilidad jw -s -5 -4 -3 -2 -1 Pasos para construir root-locus Ejemplo: • Paso 1: Debido a que el lugar geométrico de las raíces comienza en los polos a lazo abierto y terminan en los ceros a lazo abierto se debe dibujar estos sobre el plano-s.
Sistemas de control Estabilidad jw X 0 X X X s1 -5 -4 -3 -2 -1 -s Pasos para construir root-locus • Paso 2:Utilizando la condición de ángulo se determina que parte del eje real pertenece al root-locus. Supondremos raíces dentro de los intervalos en el plano-s.
Sistemas de control Estabilidad Esta ecuación es positiva, me equivoque en clase Pasos para construir root-locus • Paso 3: Considerando que la función de transferencia a lazo abierto tiene n polos y m zeros y que para los sistemas n>m, se tiene un cierto número de ramas que comienzan en los polos y deben dirigirse a los zeros, como hay menos zeros que polos, estas ramas se dirigen a ceros en el infinito a lo largo de asíntotas. El Número de asíntotas es: NA=n-m La ubicación del punto de partida Y el ángulo de salida es:
Sistemas de control Estabilidad Pasos para construir root-locus
Sistemas de control Estabilidad Pasos para construir root-locus • Paso 4: Puntos de ruptura sR1=-0.43; sR2=-1.6; sR3=-3,3+0,68j; sR4=-3,3-0,68j
Sistemas de control Estabilidad Pasos para construir root-locus • Paso 5: Dibujar
Sistemas de control Estabilidad Pasos para construir root-locus • Paso 6: el punto en el cual el root locus corta el eje imaginario. Se puede hallar usando el criterio de Routh-Hurwitz.
Sistemas de control Estabilidad Pasos para construir root-locus • Paso 6: Se cálcula el valor de K para que una fila completa sean puros ceros. En este caso la fila es s1 y el valor de K=9.65. Tomaremos el polinomio auxiliar y despejaremos el valor de s. Entonces los puntos donde el LGR cruza el eje imaginario es ±1.5888j.
Sistemas de control Estabilidad Resultado final
Ejercicio de Lugar Geométrico de las Raíces Universidad Simón Bolívar Sede del Litoral Sistema de Control TI-2233 Miguel Rodríguez Celi mirodriguez@usb.ve
Ejercicio Dibuje el LGR del siguiente función de transferencia a lazo abierto 1º paso, representar los polos y zeros o x x -10 -1 -5 Miguel Rodríguez
Ejercicio 2º paso: Hallar donde existe el LGR, se procede de derecha a izquierda a contar los polos y zeros, y cuando la suma sea impar en ese intervalo si existe el LGR, si es par No existe el LGR. Número impar Número Par Número impar o x x -10 -1 -5 Miguel Rodríguez
Ejercicio 3º paso: Hallar las asíntotas, los ángulos de las asíntotas y los puntos de partidas. Solo hay una Asíntota q es solamente 0, porque NA=1 El punto de partida se encuentra en el lado derecho. o x x -10 -1 -5 Miguel Rodríguez
Ejercicio 4º paso: Hallar los puntos de rupturas, como los polos deben ir a los zeros, y solo tenemos un cero y está después de los dos polos el LGR debe alejarse del eje real para poder llegar al zero en -10 y al zero en –inf. o x x -10 -1 -5 Miguel Rodríguez
Ejercicio 5º paso: Dibujar el LGR, debemos alejarnos, En realidad con esta técnica se dibuja un croquis del LGR, para hallar los verdaderos puntos donde el sistema es críticamente amortiguado, que son los lugares donde el LGR se separa del eje real se debe usar la EC a lazo cerrado. 4.52 o x x º -10 -1 -5 Miguel Rodríguez
Ejercicio Valores de K para que el sistema sea críticamente amortiguado: Comparando la EC con la respuesta ideal De la primera ecuación tenemos K=2a-6 y sustituyendo en la segunda. Miguel Rodríguez
Ejercicio Así el LGR queda definido como: -16.70 -3.29 o x x º º -10 -1 -5 Miguel Rodríguez
Ejercicio Usando un programa matemático: Miguel Rodríguez