Download
1 / 48
540 likes | 1.29k Views
Regulisani elektromotorni pogoni sa mašinama jednosmerne struje. Osnovne karakteristike Načini realizacije (aktuatora) Rad u 2 ili 4 kvadranta Rad u proširenom opsegu brzina. Naponski izvor. naponski upravljivi izvor. u c. u a. M. . A u. Strujni izvor. strujni upravljivi izvor.

E N D
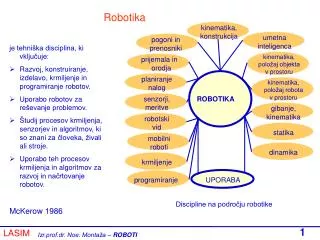
Regulisani elektromotorni pogoni sa mašinama jednosmerne struje Osnovne karakteristike Načini realizacije (aktuatora) Rad u 2 ili 4 kvadranta Rad u proširenom opsegu brzina
Naponski izvor naponski upravljivi izvor uc ua M Au
Strujni izvor strujni upravljivi izvor uc ia M Ai
Poređenje statičkih mehaničkih karakteristika Naponski izvor (naponsko napajanje) Strujni izvor (strujno napajanje) w w mm2 mm2 mm1 mm1 m m
Naponsko napajanje: • sporiji odziv • stabilnost • nema kontrole nad strujom (prevazilazi se regulatorom struje) • Strujno napajanje: • brži odziv (!) • stabilnost (?) - prevazilazi se regulatorom brzine • neposredna kontrola nad strujom
Regulisani pogon sa regulatorom brzine sa jednosmernim motorom napajanim iz strujnog izvora Reg. Ai
Praktična realizacija strujnog izvoraNaponski izvor + regulator struje Reg. ia Au realni strujni izvor
Brzina promene brzine je značajno manja od brzine promene struje indukta ia. • Pri promeni važi i • Ako uzmemo PI - regulator ia: realni strujni izvor: kompenzacija→ Ti = Ta Optimizacija po modulu 0 t
Regulator brzine: Reg.
Funkcija spregnutog prenosa brzinske petlje Primenom optimizacije: gde je a=2+1 - željeni relativni faktor prigušenja zatvorene brzinske petlje. Sledi da je:
Regulisani elektromotorni pogon sa motorom jednosmerne struje - osnovna struktura Zadavanje željenog položaja Prilagođenje reference (soft-start) ua + + M Reg. pol. + Reg. pob. Reg. brzine Reg. struje DP DB - - - ia Aktuator
Regulisani elektromotorni pogon sa motorom jednosmerne struje bez regulacije položaja Zadavanježeljenebrzine ua Prilagođenje reference (soft-start) + M + Reg. pob. Reg. brzine Reg. struje DB - - ia Aktuator
Realizacija bloka za prilagođenje reference Integrator u kontinualnom vremenskom domenu Limit = ±0,5 Invertuje signal
Realizacija bloka za prilagođenje reference Integrator u diskretnom vremenskom domenu
Realizacija bloka za prilagođenje reference Uticaj pojačanja
Realizacija bloka za prilagođenje reference Uticaj promene limita na ubrzanje Limit = ±0,75
Realizacija bloka za prilagođenje reference Soft-start + filter Limit = ±1,5
Simulacioni blok dijagram Ra = 0.075; PsiFn = 1-Ra; Ta = 30e-3; Tm = 1.92; ktg = 0.05; Kpw = ktg; Tpw = 52.8e-3; Kpi = 0.025; Tpi = 2.6e-3; Tt = 1.66e-3; Kt = 30; Ti = Ta; Ki = 0.3516; Tw = 245.33e-3; Kw = 8.46; mm = PsiFn/2; Vwref1 = 0.5 * Kpw; Vwref2 = 0.25 * Kpw; LIM_UC = 1; LIM_IA = 2 * Kpi; LIM_SS = 0.5 * Kpw; Regulator brzine
Početna zadata brzina je 0,5 wnom. U trenutku t=3s zadaje se brzina 0,75 wnom. Opterećenje pogona polovinom nominalnog momenta je u t = 6s
Uticaj limita momenta na odziv regulatora brzine Povećano je željeno ubrzanje u bloku soft starta. Zbog ograničenja struje, ne dostiže se zadata brzina u toku soft-starta.
Statička karakteristika regulisanog pogona ω slabljenje polja nom –mmax mmax me 0 –nom
KOMBINOVANO UPRAVLJANJE(PROMENOM NAPONA INDUKTA I PREKO POBUDE) f ua N: ua fnom e ≈const.
Aktuatori • Tiristorski ispravljači (mosne sprege, mrežna komutacija) • Više-kvadratni rad • Generator jednosmerne struje (Vard Leonard) • Čoperi Uprošćeni blok dijagram aktuatora Uprošćena prenosna funkcija aktuatora uc ua Tak = ? zavisi od vrste aktuatora
Četvoro- kvadratni rad sa preklopnikom Regulacija brzine za male brzine reversa! Logičko kolo: - promena stanja prekidača samo kada je ia= 0 - položaj prekidača u funkciji od znakaia*
Četvoro-kvadratni rad sa dva anti-paralelna mosta (razdeljeno upravljanje)
Logičko kolo Logičko kolo deluje na blokiranje impulsa mosta koji ne treba da vodi. ia “and” “and” buffer 1=ON & & 1 & & 1 1=ON Pogoni sa razdeljenim upravljanjem mogu da ostvare bržu promenu znaka struje nego pogoni sa preklopnikom.
Četvoro-kvadrantni rad sa kružnom strujom(saglasno upravljanje) Koristi se za ostvarivanje brzih reversa (promene znaka) momenta. C1 – ISP. C2 – INV. C1 – ISP. C2 – INV. me C1 – INV. C2 – ISP. C1 – INV. C2 – ISP.
Dijagram trenutnih vrednosti napona kružna struja samo za
Generator referentnih struja i1* i i2* ic –cirkulaciona (kružna) struja Po vrednosti, kružna struja bi trebalo da bude minimalna, ali da se tiristori odgovarajućeg mosta održavaju u provodnom stanju. ic ia*
Vard Leonardova grupa zamajac PM G M DB ia g Vc Ref. if Reg A
Vard Leonardova grupa (blok dijagram) karakteristika magnećenja A - pojačanje KO1
Vard Leonardova grupa Regulator: PI + PID Regulator struje ia Regulator brzine Vc + PI PID + - - REG ia: drugog reda. trećeg reda. REG :
Vard Leonardova grupa regulator (PI + PI + PI) Regulator brzine Regulator struje if Regulator struje ia Vc PI PI PI + + + - - - - drugog reda. REG if: REG ia: drugog reda. trećeg reda. REG :
3 4 2 1 Struktura regulatora Δ komparator Reg. * + + - - ia ua udc t Trenutne vrednosti napona i struje motora -udc ia t
AKT Upravljanje motorom kod regulacije brzine u proširenom opsegu brzina (sa slabljenjem polja) Reg. Reg. ia AKT Reg. e MOTOR
Merenje elektromotorne sile nije moguće.Izračunava se na osnovu merenja dostupnih veličina. Prvi način: merenjem struje i napona indukta + - - Drugi način: merenjem struje pobude i brzine if e w
Blok dijagram sistema pri brzini većoj od nominalne Reg. Reg. ia AKT Nelinearno