Download
1 / 63
640 likes | 972 Views
Milestone 2: Project Proposal. E.E Advisor : Dr. Li M.E. Advisor : Dr. Shih Team Members: Tomas Bacci Danny Covyeau Scott Hill Stephen Kempinski George Nimick Sam Risberg. Proposed Design. Overview Electric Category

E N D
Milestone 2: Project Proposal E.E Advisor : Dr. Li M.E. Advisor : Dr. Shih Team Members: Tomas Bacci Danny Covyeau Scott Hill Stephen Kempinski George Nimick Sam Risberg
Proposed Design • Overview • Electric Category • Mechanical – braking, chassis, suspension and steering • Electrical – motor design and battery management • Direction • Feasibility, tangibility, and budget • Constraints • Budget, rules
University of Texas, ArlingtonNearly every vehicle from 1984 - 2008
Project Management • ME Systems • ME Leader – George Nimick • Chassis – George Nimick and Sam Risberg • Braking – Sam Risberg • FEA – George Nimick and Tomas Bacci • Steering and Suspension – Stephen Kempinski and Tomas Bacci • EE Systems • EE Leader – Scott Hill • Motor Control and Design – Danny Covyeau • Battery Management and Accumulator Design - Scott Hill
Propulsion • 4 electric motors, one on each wheel. • Mounted onboard the vehicle (i.e. not ‘in-wheel’ or ‘hub’ motors) • Each motor will have its own gear reduction so as to limit the top speed of the vehicle as well as increase the mechanical torque. • 2 motor controllers, 2 motors per controller • 1 controller for two front motors • 1 controller for two rear motors • Motors will be wired in a series configuration • 2 HV battery packs, 1 per controller • Will help distribute the weight evenly between the front and rear of the vehicle.
Why AWD? • Traction at all four wheels • Cornering Stability • Load Transfer • Deceleration • Regenerative Braking Advantage • Acceleration • AWD biased towards the rear wheels • Formula SAE Dynamic Events • Autocross • Average Speed: 25 – 30 mph • Endurance • Average Speed: 29.8 – 35.4 mph • For more information see: • http://autopedia.com/stuttgart-west/Physics/StuttPhysics01.html http://www.motortrend.com/roadtests/sedans/112_0506_front_rear_allwheel_drive/viewall.html
Electric Drive • The electric motors must work with one another in such a way to safely, efficiently and quickly propel the vehicle. • The motors should all be the same make and model to simplify the design.
Electric Motors Robotmarketplace.com Agni 95-R • Permanent Magnet • 72 VDC • 400 Amp peak • 93% Peak Efficiency • 30 peak horsepower • Only 24 lbs • 6000 rpm max rotational speed
Motor Controllers • The motor controllers should be able to control two motors in series simultaneously • Regenerative Braking built-in • The motor controller selected should be specifically built for the type of motor chosen (i.e. ac induction, series dc, etc). • It should be able to handle at least twice the rated voltage of the motor and the same maximum current of the motor. Cloudelectric.com
Motor Control System • The motor control system will consist of two permanent magnet motor controllers. • One will control the front motors while the other will control the rear motors. • The motors in the front/back will be connected in a series configuration such that a single controller can operate both motors simultaneously. • This will not only simplify the design but will also create somewhat of a differential-like effect for the front and rear. • Separate battery packs • One in the front and one in the rear to help create a better weight balance between the front and rear. • These packs will be wired in parallel with one another to maintain a constant potential difference between the front and rear controllers and so that there is a common ground.
Throttle Control • The throttle should directly affect the vehicles speed and/or torque. • Theory: • Accelerator pedal called a pot box or potentiometer box. • Sends an analog signal to the ECU. • The ECU will then plug this signal, along with signals from each motors RPM sensor, the brake pedal, and other sensors into an algorithm that will determine what analog values to send to both the front and rear motor controllers. • The front and rear controllers will receive different signals depending on the amount of torque desired at either end. Cloudelectric.com
Hobbyking.com Accumulator Picture Courtesy Danny Covyeau • Lithium Polymer Batteries • Voltage Per Cell : 3.7V • Desired Pack Configuration: 3S String with 11.1V per pack • Chosen because desired voltage for each motor controller is 144V and in series it takes almost exactly 13 batteries to achieve this voltage • Due to competition rules (fusing parallel connections) the team cannot easily use packs that are internally wired in parallel. Therefore packs such as 3s2p that would achieve higher than 8Ah per pack cannot be used.
Battery Characteristics • Maximum Capacity : 5,400 Wh • With a voltage of 144V current capacity of 37.5Ah is required to be at the maximum • This is before efficiency is taken into account though so a current capacity of 40Ah will be used. • With a current capacity of 40Ah our vehicle will require a total of 8 parallel strings if 5Ah batteries are used. • If 5.8Ah batteries are used the we could get away with 7 parallel strings, This would save us 13 batteries! *Prices based off of hobby king Retail website
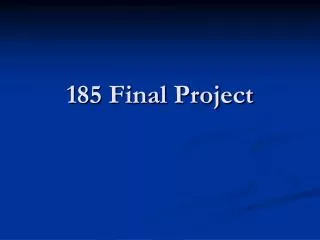
Simulation Schematic 13s8p configuration (actually 39s8p configuration with 3s packs) Battery Discharge Simulation
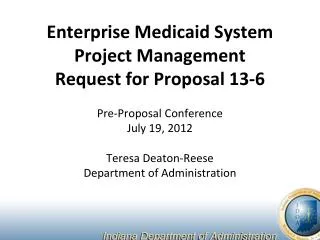
Simulation with a 5Ω Resistive Load Without SOC Measurement Battery DischargeSimulation (Cont). Voltage Reading Current Reading Operating Region
Capacitors Picture Courtesy Danny Covyeau • Capacitors are being considered for the vehicle in order to take advantage of regenerative braking function included in the controller Danny talked about previously. • According to the Formula Hybrid SAE 2012 Competition Rules “Endurance courses will be configured, where possible, in a manner which maximizes the advantage of regenerative braking.”
Battery Management System • The 2009-2010 teams car used a e-lithion Lithiumate pro BMS. • To our knowledge the BMS is working and will be used in the 2011 car for purposes of budget • More research needs to be done on the on the Cell boards BMS Master Cell Board Elithion.com Picture taken from 2009-2010 Car
Battery Charging System • The battery charging system for this years team will need to be much larger than last years since the vehicle is fully electric • The proposed charger is the “Battery Charger HWC4 Series Charger High Output 144V/15A 220VAC Input” • This charger also has a variable charge mode if battery configuration needs to be changed in the case of a large failure in the accumulator system PLCcenter.com Cloudelectric.com
Accumulator Enclosure • A clear polycarbonate insulating material will be used to construct the accumulator enclosure • This material will allow for easy inspection at the competition • This material allows proper insulation of the HV accumulator and the frame of the vehicle Newegg.com TapPlastics.com
Accumulator System Budget ** Company Needs to be contacted for pricing *Already Have 1 BMS master from 2009-2010 Team (Need 2 total)
Nov 1 Feb 1 Dec 1 Jan 1 Timeline Mar 1
Constructing the chassis • Strong Enclosure and component platform • The chassis will house the driver and a strong enclosure is required to ensure safety • The chassis will not only need to be aerodynamics, but should have a ideal weight distribution and center of gravity • Perform FEA
Chassis Ergonomics • Mounting for: • Brakes • Suspension • Motors • Driver accommodations • Safety equipment mounting • Steering • Body panels • Batteries
Steering speedwaymotors.com
Goal • Control direction • Selection • Mechanical (Rules) • Less than 7 degrees of free play • Choices: rack and pinion, recirculating ball, worm and sector, articulated steering and four wheel steering • Constraints • Effectiveness • Practicality • Cost • Choice: Rack and Pinion • Installation • Non-binding • Driver operation • Steering shaft Steering
Braking system • Single control to ensure safe stop on four wheels • -We will have one pedal acting on four wheels • -A master cylinder will multiply the pedal force into a hydraulic force • Two independent hydraulic circuits • One circuit will control the rear wheel braking the other the front • This will ensure if one circuit fail another will be in place • Safety will be the main concern for this system
Braking Continued • Brake line Durability • We won’t be using a factory rubber brake line • Stainless Steel braided line will prove more durable for racing situations and heat produced from the extreme conditions • Testing the brakes • To test the systems we will apply maximum pressure to the brake pedal at a high speed and ensure all four wheels lock up as stated in the FSAE Hybrid rules.
Competition Constraints • 3.2.1 Suspension • fully operational suspension system with shock absorbers, front and rear • usable wheel travel of at least 50.8 mm (2 inches), 25.4 mm (1 inch) jounce and 25.4 mm (1 inch) rebound, with driver seated. • 3.2.2 Ground Clearance • with the driver aboard there must be a minimum of 25.4 mm (1 inch) of static ground clearance under the complete car at all times.
Competition Constraints Continued… • 3.2.3 Wheels and Tires • 3.2.3.1 Wheels • The wheels of the car must be 203.2 mm (8.0 inches) or more in diameter. • 3.2.3.2 Tires • Vehicles may have two types of tires as follows: • Dry Tires – The tires on the vehicle when it is presented for technical inspection are defined as its “Dry Tires”. The dry tires may be any size or type. They may be slicks or treaded. • Rain Tires – Rain tires may be any size or type of treaded or grooved tire provided:
Understanding Vehicle Dynamics • Weight transfer – actual movement of the vehicle CoM relative to the wheel axes due to displacement of the chassis as the suspension complies. • Downforce - downwards thrust created by the aerodynamic characteristics of a car. • Roll center - the notional point at which the cornering forces in the suspension are reacted to the vehicle chassis/body. • Camber – angle of the wheel relative to vertical. • Caster – angle to which the steering pivot axis is tilted forward or rearward from vertical • Toe – angle that each wheel makes with the longitudinal axis of the vehicle • Pitch - front and rear of the chassis go in opposite directions. • Yaw - rotation of the car in a horizontal plane around a vertical axis. • Heave - movement of the diagonally opposed wheels in opposite directions
Set up accuracy • Dependent on: • Springs • Shocks • Camber • Caster • Toe • Tire pressure • Ride height • Wings
Independent Suspension • Better ride quality • Improved handling • fully adjustable
SLA Double Wishbone • Short Long Arm Suspension • Lower A-Arm is longer than the Upper A-Arm • Reduced changes in camber angles • Reduces tire wear • Increases contact patch for improved traction
Connection to Sprung Mass • Predetermined geometry points • Chassis may be modified to accommodate • Mounting brackets welded to chassis