Download
1 / 1
10 likes | 123 Views
YSI 6920 Water monitoring instrument: Temperature, Salinity, Dissolved Oxygen, ph and Chlorophyll A.

E N D
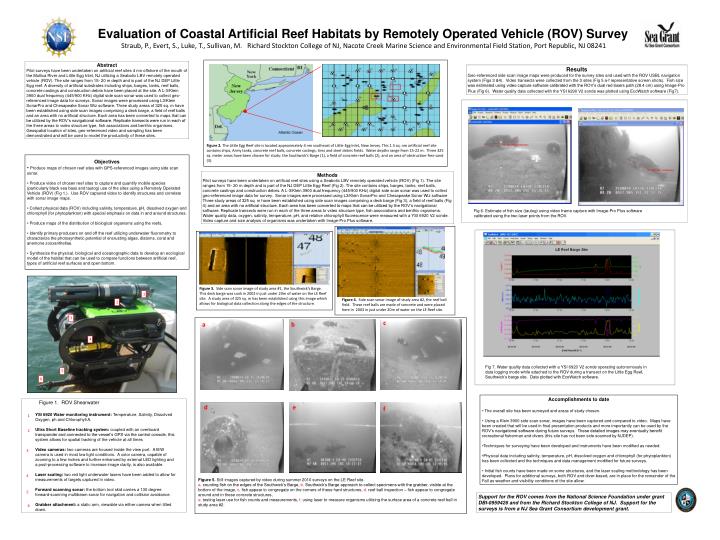
YSI 6920 Water monitoring instrument: Temperature, Salinity, Dissolved Oxygen, ph and Chlorophyll A. Ultra Short Baseline tracking system: coupled with an overboard transponder and connected to the vessel’s GPS via the control console, this system allows for spatial tracking of the vehicle at all times Video cameras: two cameras are housed inside the view port. A B/W camera is used in most low light conditions. A color camera, capable of zooming to a few inches and further enhanced by external LED lighting and a post-processing software to increase image clarity, is also available. Laser scaling: two red light underwater lasers have been added to allow for measurements of targets captured in video. Forward scanning sonar: the bottom tool skid carries a 130 degree forward-scanning multibeam sonar for navigation and collision avoidance. Grabber attachment: a static arm, viewable via either camera when tilted down. 1 2 3 4 5 6 Fig 6. Estimate of fish size (tautog) using video frame capture with Image-Pro Plus software calibrated using the two laser points from the ROV.. Figure 2. The Little Egg Reef site is located approximately 4 nm southeast of Little Egg Inlet, New Jersey. This 1.5 sq. nm artificial reef site contains ships, Army tanks, concrete reef balls, concrete castings, tires and steel debris fields. Water depths range from 15-22 m. Three 325 sq. meter areas have been chosen for study: the Southwick’s Barge (1), a field of concrete reef balls (2), and an area of obstruction-free sand (3). Figure 4. Side scan sonar image of study area #2, the reef ball field. These reef balls are made of concrete and were placed here in 2003 in just under 20m of water on the LE Reef site. Fig 7. Water quality data collected with a YSI 6920 V2 sonde operating autonomously in data logging mode while attached to the ROV during a transect on the Little Egg Reef, Southwick’s barge site. Data plotted with EcoWatch software. Figure 1. ROV Shearwater Evaluation of Coastal Artificial Reef Habitats by Remotely Operated Vehicle (ROV) Survey Straub, P., Evert, S., Luke, T., Sullivan, M. Richard Stockton College of NJ, Nacote Creek Marine Science and Environmental Field Station, Port Republic, NJ 08241 Abstract Pilot surveys have been undertaken on artificial reef sites 4 nm offshore of the mouth of the Mullica River and Little Egg Inlet, NJ utilizing a Seabotix LBV remotely operated vehicle (ROV). The site ranges from 15- 20 m depth and is part of the NJ DEP Little Egg reef. A diversity of artificial substrates including ships, barges, tanks, reef balls, concrete castings and construction debris have been placed at the site. A L-3/Klein 3900 dual frequency (445/900 KHz) digital side scan sonar was used to collect geo-referenced image data for surveys. Sonar images were processed using L3/Klein SonarPro and Chesapeake Sonar Wiz software. Three study areas of 325 sq. m have been established using side scan images comprising a deck barge, a field of reef balls and an area with no artificial structure. Each area has been converted to maps that can be utilized by the ROV’s navigational software. Replicate transects were run in each of the three areas to video structure type, fish associations and benthic organisms. Geospatial location of sites, geo-referenced video and sampling has been demonstrated and will be used to model the productivity of these sites. Results Geo-referenced side scan image maps were produced for the survey sites and used with the ROV USBL navigation system (Figs 3 &4). Video transects were collected from the 3 sites (Fig 5 a-f representative screen shots). Fish size was estimated using video capture software calibrated with the ROV’s dual red lasers path (28.4 cm) using Image-Pro Plus (Fig 6). Water quality data collected with the YSI 6290 V2 sonde was plotted using EcoWatch software (Fig7). • Objectives • Produce maps of chosen reef sites with GPS-referenced images using side scan sonar. • Produce video of chosen reef sites to capture and quantify mobile species (particularly black sea bass and tautog) use of the sites using a Remotely Operated Vehicle (ROV) (Fig 1.). Use ROV captured video to identify structures and correlate with sonar image maps. • Collect physical data (ROV) including salinity, temperature, pH, dissolved oxygen and chlorophyll (for phytoplankton) with special emphasis on data in and around structures. • Produce maps of the distribution of biological organisms using the reefs, • Identify primary producers on and off the reef utilizing underwater fluorometry to characterize the photosynthetic potential of encrusting algae, diatoms, coral and anemone zooxanthellae. • Synthesize the physical, biological and oceanographic data to develop an ecological model of the habitat that can be used to compare functions between artificial reef, types of artificial reef surfaces and open bottom. c a b 1 2 Methods Pilot surveys have been undertaken on artificial reef sites using a Seabotix LBV remotely operated vehicle (ROV) (Fig 1). The site ranges from 15- 20 m depth and is part of the NJ DEP Little Egg Reef (Fig 2). The site contains ships, barges, tanks, reef balls, concrete castings and construction debris. A L-3/Klein 3900 dual frequency (445/900 KHz) digital side scan sonar was used to collect geo-referenced image data for survey. Sonar images were processed using L3/Klein SonarPro and Chesapeake Sonar Wiz software Three study areas of 325 sq. m have been established using side scan images comprising a deck barge (Fig 3), a field of reef balls (Fig 4) and an area with no artificial structure. Each area has been converted to maps that can be utilized by the ROV’s navigational software. Replicate transects were run in each of the three areas to video structure type, fish associations and benthic organisms. Water quality data, oxygen, salinity, temperature, pH, and relative chlorophyll fluorescence were measured with a YSI 6920 V2 sonde. Video capture and size analysis of organisms was undertaken with Image-Pro Plus software. 3 4 d e f 5 6 Figure 3. Side scan sonar image of study area #1, the Southwick’s Barge. This deck barge was sunk in 2002 in just under 20m of water on the LE Reef site. A study area of 325 sq. m has been established using this image which allows for biological data collection along the edges of the structure. • Accomplishments to date • The overall site has been surveyed and areas of study chosen. • Using a Klein 3900 side scan sonar, images have been captured and compared to video. Maps have been created that will be used in final presentation products and more importantly can be used by the ROV’s navigational software during future surveys. These detailed images may eventually benefit recreational fisherman and divers (this site has not been side scanned by NJDEP). • Techniques for surveying have been developed and instruments have been modified as needed. • Physical data including salinity, temperature, pH, dissolved oxygen and chlorophyll (for phytoplankton) has been collected and the techniques and data management modified for future surveys. • Initial fish counts have been made on some structures, and the laser scaling methodology has been developed. Plans for additional surveys, both ROV and diver-based, are in place for the remainder of the Fall as weather and visibility conditions of the site allow. Figure 5. Still images captured by video during summer 2010 surveys on the LE Reef site. a. counting fish on the edges of the Southwick’s Barge, b. Southwick’s Barge approach to collect specimens with the grabber, visible at the bottom of the image, c. fish appear to congregate on the corners of these hard structures, d. reef ball inspection – fish appear to congregate around and in these concrete structures, e. testing laser use for fish counts and measurements, f. using laser to measure organisms utilizing the surface area of a concrete reef ball in study area #2. Support for the ROV comes from the National Science Foundation under grant DBI-0959426 and from the Richard Stockton College of NJ. Support for the surveys is from a NJ Sea Grant Consortium development grant.