Download
1 / 48
480 likes | 790 Views
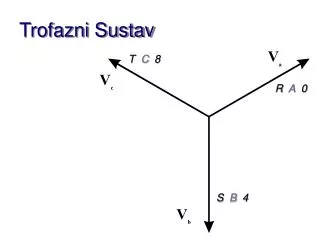
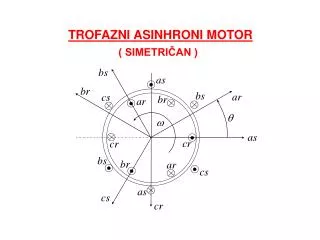
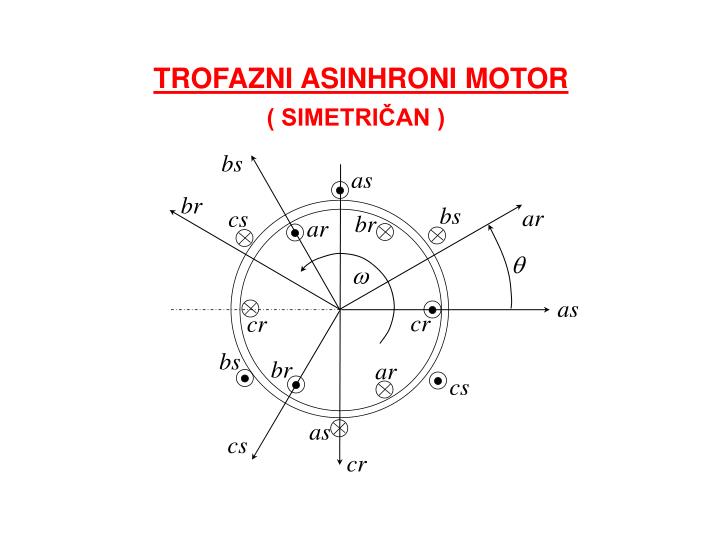
bs. as. br. bs. ar. cs. br. ar. . . as. cr. cr. bs. br. ar. cs. as. cs. cr. TROFAZNI ASINHRONI MOTOR. ( SIMETRIČAN ). Naponska jednačina:. U prethodnim jedna činama koristi se:. Matrice induktivnosti:. Ako uvedemo smenu:. može se napisati:.

E N D
bs as br bs ar cs br ar as cr cr bs br ar cs as cs cr TROFAZNI ASINHRONI MOTOR ( SIMETRIČAN )
Naponska jednačina: U prethodnim jednačinama koristi se:
Matrice induktivnosti: Ako uvedemo smenu: može se napisati:
Svođenje rotorskih veličina na stator ( postupak svođenja je objašnjen u delu "Magnetno spregnuta kola "). Bez dokaza (!), ali na osnovu analogije (M1 = (N1 /N2 )L12 ). Sada se može napisati:
Polazeći od izvedene relacije ( M1 = (N1 /N2)2M2 ) može se napisati: Mr = (Nr /Ns )2Ms Ako se uzme: Lr'= (Ns /Nr )2Lr dobija se: gde je: λr'= (Ns /Nr)2λr
Posle svođenja "rotora na stator" jednačina za fluks i naponska jednačina su: Pri čemu važi relacija: Rr'= (Ns /Nr)2Rr - operator
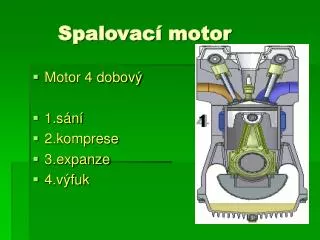
JEDNAČINA MOMENTA Na osnovu relacija izvedenih u predavanju "El. meh. konverzija energije" može se napisati izraz za el. energiju koja se pretvara u meh. Mehanička snaga motora može se izraziti preko elektromagnetnog momenta i brzine obrtanja: m- stvarni mehanički položaj rotora. - položaj rotora izražen u el.rad/s.
Elektromagnetni momenat motora je: Dobijeni izraz je veoma komplikovan i praktično neupotrebljiv !!
bs q s q q s as 0 0 d d cs d qd – TRASFORMACIJA U cilju uprošćenja uvodi se REFERENTNI qd - sistem koji rotira zajedno sa obrtnim magnetnim poljem motora, tzv. sinhroni referentni sistem osa. Prelazak iz realnog abc - sistema u qdo - sistem vrši se pomoću matrice transformacije K. Transformacije na statoru:
Gde je: rs - trenutni položaj referentnog sistema, - trenutni položaj rotora motora, rs - brzina referentnog sistema, - brzina motora, s - sinhronabrzina. Kada je rs=s =cost. i s (0) = 0.
Šta se postiže transformacijama? Na primer kod simetričnog trofaznog sistema koji ima konstantnu učestanost: posle transformacije se dobija: Umesto trofaznog naizmeničnog sistema dobijamo jednostavan sistem od dve " jednosmerne " veličine.
ar rs q rsr rs as d Transformacije na rotoru: rsr - trenutni položaj rotora u odnosu na referentni sistem.
Šta se postiže ovom transformacijom: Kada je rs=s =cost. , s (0) = 0 i rsr=r=s–, za simetričan rotorski sistem posle transformacije dobija se:
bs as = q cs d REFERENTNI qd - sistem koji je vezan za stator, tzv. stacionarni referentni sistem osa. Prelazak iz realnog abc - sistema u qdo - sistem vrši se pomoću matrice transformacije K. Transformacije na statoru:
Šta se postiže transformacijama? Na primer kod simetričnog trofaznog sistema koji ima konstantnu učestanost: posle transformacije se dobija: Umesto trofaznog naizmeničnog sistema dobijamo dvofazni sistem.
ar rs q rsr rs as d Transformacije na rotoru: rsr - trenutni položaj rotora u odnosu na referentni sistem.
Šta se postiže ovom transformacijom: Kada je rs=0i rsr=r=, za simetričan rotorski sistem posle transformacije dobija se: Umesto trofaznog naizmeničnog sistema dobijamo dvofazni sistem.
TRANSFORMACIJE NAPONSKIH JEDNAČINA ASINHRONOG MOTORA Prvi karakterističan slučaj: Množeći ovu jednačinu sa desne strane sa K dobija se:
Kod simetričnih sistema je: Prema tome dobija se: Drugi karakterističan slučaj: Posle množenja sa K dobija se:
ako je = . t, sledi: Konačno je:
Da bi bilo jasnije, predhodna jednačina se može razbiti na: Primenićemo izvedene relacije na naponske jednačine asinhronog motora: O - kvadratna (33) nula matrica.
TRANSFORMACIJE JEDNAČINA FLUKSA ASINHRONOG MOTORA VAŽNO !!!
U tom slučaju naponska jednačina asinhronog motora je: a jednačina za flukseve je:
U nekim slučajevima je pogodno uvesti sledeće smene: = b - " fluks po sekundi " Wbs-1; X? = bL? - reaktansa ; Xm = bM - reaktansa magnećenja ; p' = p/b = d()/d(bt) - ovaj novi operator nema dimenziju.
Sada je naponska jednačina: a jednačina fluksa: Gde je:
(s- )'dr sds r'r s 'r rs i'qr iqs uqs u'qr M EKVIVALENTNE ŠEME MOTORA Ekvi šema po q-osi:
(s- )'qr sqs r'r s 'r rs i'dr ids uds u'dr M Ekvi šema po d-osi:
JEDNAČINE MOMENTA Ako se pođe od izvedene jednačine: mogu se dobiti sledeći izrazi: itd.
NORMALIZACIJA Potrebno je na već poznate bazne vrednosti dodati: Važno je napomenuti da je sada i vreme normalizovano jer se ima odnosno: Sve ostalo je kao što je već pokazano!!
Posle normalizacije naponska jednačina se može napisati u obliku pogodnom za modelovanje. N: Jednačina za flukseve može se napisati i u obliku: gde je:
Elektromagnetni momenat motora: Na sličan način se normalizuju i ostali izrazi za momenat. Normalizovana Njutnova jednačina je: gde je: Mora se zapaziti da je u jednačini brzina obrtanja [rad.el./s],a ne mehanička ugaona brzinam[rad.meh].
+ Im Fq + q Re Fd d - STACIONARNO STANJE Posmatrajmo predhodan sistem jednačina u stacionarnom stanju p' 0. Definišio fazore promenljivih u abc – sistemu preko odgovarajućih promenljivih iz qd – sistema. U skladu sa gornjom slikom može se napisati:
Naponske jednačine u stacionarnom stanju su: N: Napon u a – fazi statora: Napon u a – fazi rotora:
r'r/s rs jsXs jsX'r jsXm Uvedimo smenu: s – klizanje Ekvivalentna šema je: N:
fs= fn=50Hz, s=314 me 'qr 'dr Slika 1: Start motora u praznom hodu
opterećenje me 'qr 'dr Slika 2: Start motora u praznom hodu i opterećenje
momenat [r.j.] Start u praznom hodu brzina [r.j.] Slika 3: Mehanička karakteristika
me mm Start pod opterećenjem Slika 4: Mehanička karakteristika
me ids iqs Slika 5: Start motora u praznom hodu
ias me Slika 6: Start motora u praznom hodu
iqs me opterećenje 80% ids Slika 7: Prazan hod - opterećenje
ias i'ar opterećenje 80% Slika 8: Prazan hod - opterećenje