Download
1 / 20
200 likes | 223 Views
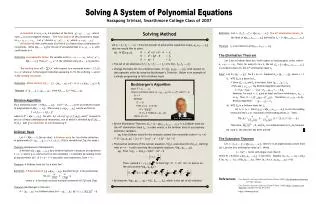
Learn about solving systems of equations and linear programming theorems, including Farkas' Theorem and Duality Principle. Explore how rank analysis applies to potential solutions and witness determinations. Discover key concepts like non-negativity, convexity, and hyperplane separation. Duality and solution methods like Simplex, Ellipsoid, and Interior Point are also covered.

E N D
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 3
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 3 1 -2 1 0 = 2 no solution
Solving a system of equations a11 x1 + a12 x2 + a13 x3 = b1 a21 x1 + a22 x2 + a23 x3 = b2 a31 x1 + a32 x2 + a33 x3 = b3 A x = b has a solution iff rank (A) = rank (A b)
Solving a system of equations A x = b has a solution iff rank (A) = rank (A b) rank (A) < rank (A b) then y such that yT A = 0 and yT b 0
Solving a system of equations A x = b has a solution iff rank (A) = rank (A b) rank (A) < rank (A b) then y such that yT A = 0 and yT b 0 y is a witness that A x = b does not have a solution
Solving a system of equations yT A = 0 and yT b 0 y is a witness that A x = b does not have a solution A x = b yT (A x) = yT b (yT A) x = yT b 0 = yT b a contradiction
Solving a system of equations Theorem: If Ax=b doesn’t have solution then y such that yT A =0 and yT b 0
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1 x1 = -3 x2 = 2 x3 = 0
Back to linear programming 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1 x1 0 x2 0 x3 0 I.e., we want a non-negative solution.
Back to linear programming 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1 0 -1 1 x1 + x2 + x3 = -1 x1 0 x2 0 x3 0 I.e., we want a non-negative solution.
Back to linear programming yTA 0 and yTb < 0 y is a witness that A x = b, x 0 does not have a solution A x = b yT(A x) = yTb (yTA) x = yTb non-negative = negative, a contradiction
Back to linear programming Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution then y such that yTA 0 and yTb < 0 Theorem: If Ax=b doesn’t have solution then y such that yTA =0 and yTb 0
Idea of the proof Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution then y such that yTA 0 and yTb < 0 Ax, x 0 b
S=convex, b not in S c such that ( x S)cT x > cT b Idea of the proof Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution then y such that yTA 0 and yTb < 0 cTx Ax, x 0 b separating hyperplane
Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution y such that yTA 0 and yTb < 0 Duality max cT x Ax=b x 0 min yT b yT A cT
“” “=” and non-negativity a1 x1 + ... + an xn b a1 x1 + ... + an xn= b + y, y 0 a1 x1 + ... + an xn – y = b, y 0
“=” “” a1 x1 + ... + an xn= b a1 x1 + ... + an xn b a1 x1 + ... + an xnb a1 x1 + ... + an xn b -a1 x1 - ... - an xn -b
Duality max c1Tx1+c2Tx2 + c3Tx3 + c4Tx4 A1 x1=b1 A2 x2 b2 A3 x3 = b3 A4 x4 b4 x1 0,x2 0 min y1Tb1+y2Tb2+y3Tb3 + y4Tb4 y1T A1 c1T y2T A2 c2T y3T A3 = c3T y4T A4 = c4T y2 0, y4 0
Solving linear programs Simplex (Danzig, 40’s) Ellipsoid (Khachiyan, 80’s) Interior point (Karmakar, 80’s)