Download
1 / 18
180 likes | 351 Views
Università degli Studi di Napoli “Federico II” Facoltà di Ingegneria C.d.L. in Ingegneria Informatica. Tesi di Laurea in Controlli Automatici II. Sistemi Ausiliari di Potenza per veicoli elettrici ibridi di tipo serie. Relatore: Ch.mo Prof. Luigi Glielmo Correlatori:

E N D
Università degli Studi di Napoli “Federico II” Facoltà di Ingegneria C.d.L. in Ingegneria Informatica Tesi di Laurea in Controlli Automatici II Sistemi Ausiliari di Potenza per veicoli elettrici ibridi di tipo serie Relatore: Ch.mo Prof. Luigi Glielmo Correlatori: Prof. Francesco Vasca Ing. Giovanni Fiengo Candidato: Claudio Vivarelli matr.: 41/646
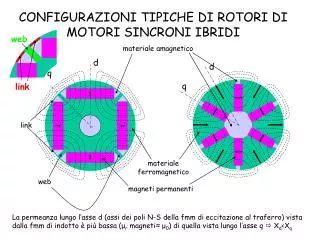
Batteria Batteria DC/AC Motore elettrico Cambio DC/AC Motore elettrico Cambio Serbatoio DC/AC ICE Generatore elettrico Serbatoio APU ICE I veicoli elettrici ibridi - HEV Ibrido di tipo parallelo Ibrido di tipo serie • struttura meccanica più complessa • controllo più sofisticato • preferibile power assist mode • costo contenuto e semplicità meccanica • efficienza motore a combustione • preferibile range extender mode
batteria inverter centralina carburante Motore elettrico asincrono ICE emissioni Auxiliary Power Unit • Modello dell’APU: • Modello del motore a combustione (ICE) • Modello del motore asincrono (EM) • Integrazione dei due modelli • Strategie di controllo APU: • Stati di funzionamento dell’APU • Gestione transitori di erogazione potenza
Dinamica benzina ωr : velocità albero motore α : angolo apertura valvola farfalla : portata aria attraverso valvola farfalla : portata aria entrante nel cilindro Pman : pressione collettore aspirazione : portata benzina iniettata : portata benzina entrante nel cilindro λ: rapporto aria/benzina Teng : coppia prodotta dalla combustione Td : coppia resistente (attrito+pompaggio) TICE : coppia netta fornita Film Fluido θ ωr Dinamica aria ωr Pman Teng Valvola a farfalla Collettore di aspirazione legge Speed-density Combustione α Tice ωr Coppia resistente Td Modello motore a combustione:
α ICE TICE Albero motore ωr TEM V EM Interazione tra ICE e EM APU: Alberi motore solidali: dove: (solo nei primi istanti)
APU: Riduzione tempi di simulazione Semplificazioni successive: • Eliminazione inverter dal modello complessivo • Riduzione del modello del motore asincrono considerando correnti statoriche a regime • Modello del motore asincrono in un riferimento solidale al flusso rotorico Configurazione di riferimento Processore AMD Duron 650Mhz 64 Mb RAM DIMM 100Mhz S.O.:Microsoft Windows 98 Ambiente : Matlab 6.0 release 12
Eliminazione modello inverter APU: Considerate istantanee le dinamiche che si esauriscono in meno di un ciclo motore modello ICE ai valori medi si consideri una velocità di rotazione ω r [rad/s] A tale velocità un giro di albero motore si completa in T=2/ω r TcicloICE = 2T 1 ciclo motore = 2 giri albero motore Considerando che la frequenza di alimentazione f in un motore asincrono è prossima alla frequenza di rotazione f = 1/T [Hz] Poiché la frequenza di commutazione dell’ inverter è fc = Ncf affinché sia Tc≪ TcicloICE deve risultareNc≫ 0.5 Sempre verificato.
EM: Modello sincrono con il flusso rotorico Equazione uscita
Specifiche per il controllo : • Avviamento: portare il termico a 2000 rpm (accelerazione max [1000rpm/s]) • Warm Up : Mantenere il termico al regime di 2X2 finché TH2O< 25° • Stazionario: erogare la potenza richiesta mantenendo a regime il termico nei punti di funzionamento mostrati in figura. • Transitori: per quanto possibile a carico del termico per evitare cali nell’erogazione di potenza. • Spegnimento: evitare colpo calore per spegnimento pompa mantenendo il motore acceso nel punto 2X2 finché TH2O> 90°
Tecnica di controllo: Avviamento, warm up e regime di velocità costante a 2000 [rpm] Controllo in velocità del motore elettrico e controllo in coppia del motore termico Regimi di velocità superiori ai 2000 [rpm] Controllo in coppia del motore elettrico e controllo in velocità del motore termico Per la generazione dei riferimenti di coppia e velocità si fa uso delle caratteristiche statiche a regime del motore a combustione all’80% del carico
Fr iD_rif r_rif PI TEMiQ Controllo in corrente TEM_rif iQ_rif vD,vQ r iQ,iD Fr r Prif TICE_rif PI ICE TICE = - TEM Tecnica di controllo: Schema di controllo in velocità del motore elettrico: Schema di controllo in coppia del motore a combustione: Si utilizza come stima della coppia motore erogata dall’ICE, la coppia del motore elettrico (ricavabile dalle grandezze elettriche) che essendo controllato a velocità costante sarà uguale ed opposta a quella erogata dal motore termico
iD_rif Fr Controllo in corrente Curva statica coppia ICE a 80% carico TEMiQ vD,vQ TEM_rif iQ_rif r r iQ,iD Fr Prif r_rif PI ICE Curva statica potenza ICE a 80% carico r Tecnica di controllo: Schema di controllo in coppia del motore elettrico: Schema di controllo in velocità del motore a combustione:
Stati di funzionamento dell’APU: Leggenda Ingressi: Preq= riferimento di potenza wreale= misura di velocità TH2O=temperatura acqua Start_EM= comando avvio trascinamento Uscite: wrif=riferimento velocità Start_ICE = comando accensione ICE Control_cond= segnale commutazione controllo Cond_min=segnale stato ONat2000 (2X2) Off_cond=segnale stato OFF Costanti: Pmin = Potenza erogabile nel punto 2X2 Pmax2000= Max Potenza erogata a 2000 rpm
Simulazione Matlab APU: In rosso : istanti di accensione/spegnimento ICE In nero : istanti di commutazione controllori
Conclusioni: Obiettivi raggiunti : • Modello motore a combustione e modello motore/generatore asincrono • Strategie di controllo funzionamento APU • Gestione transitori erogazione di potenza senza sovraelongazioni della corrente nella direzione opposta a quella richiesta. Possibili evoluzioni : • Modello ciclico del motore a combustione • Implementazione in centralina