Download
1 / 22
220 likes | 319 Views
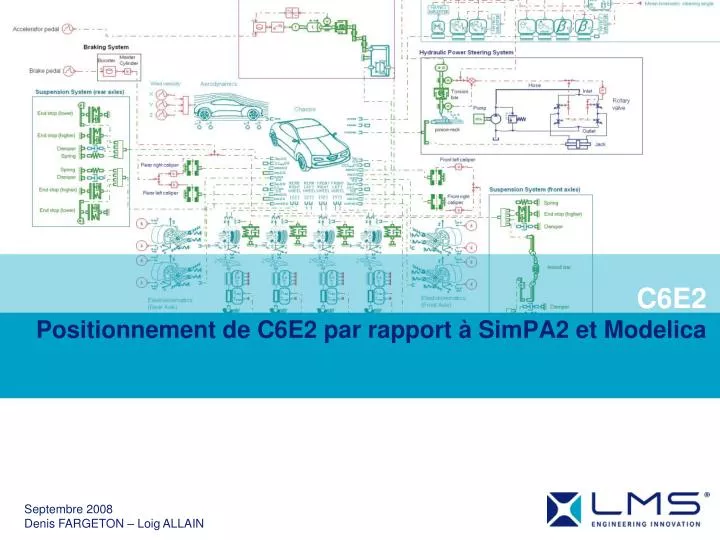
C6E2 Positionnement de C6E2 par rapport à SimPA2 et Modelica. Positionnement de C6E2 par rapport à SimPA2. C6E2 fournit des cas tests Industriels Complexes (multi physique) Représentatifs de chaque étape du cycle de conception Valorise les apports de MODELICA à chaque étape Modelica:

E N D
C6E2 Positionnement de C6E2 par rapport à SimPA2 et Modelica
Positionnement de C6E2 par rapport à SimPA2 • C6E2 fournit des cas tests • Industriels • Complexes (multi physique) • Représentatifs de chaque étape du cycle de conception • Valorise les apports de MODELICA à chaque étape • Modelica: • Multi physique • Capitalisation des librairies inter plateforme • Modélisation acausale • Compilateur adapté à la simulation des réseaux électriques
Plan • Conception en Génie Electrique • Actionneur électromécanique • Réseau Electrique • Gestion énergétique
« Cycle en V » en génie électrique Cahier des charges Produit Final Conception Ensemble Intégration ensemble Choix d’architecture Validation architecture Spécifications composants Test Composant Conception composant (fonctionnel) Conception composant (détaillée) Prototype composant
Modelica et le cycle en V • Difficultés rencontrées dans la mise en œuvre de la conception: • Suivi d’information entre les différents niveaux du cycle • Pas d’outils (ou de formalisme) commun à l’ensemble de la conception • Langage de modélisation orienté objet • Documentation: suivi des informations • Héritage: niveau de modélisation adapté à l’étape de conception • Modelica permet la spécification et la modélisation • Offre un support commun pour les différents niveau de conception • Langage de communication (asynchrone) entre différents logiciels • Compatibilité des modèles des domaines physiques différents en utilisant une approche énergétique
C6E2/SimPA2: Cas tests • 4 cas tests sont proposés qui permettent de valider différents aspects du langage • AIRBUS: réseau de bord • INRETS: véhicule hybride • Schneider Electric: Actionneur linéaire • MESSIER: conversion électromécanique • Aspects du langage: • AIRBUS: réseaux et problèmes de grande taille • INRETS: différents niveaux de modélisation • Schneider Electric: Communication inter-logiciel et validation de la conception des composants • MESSIER: spécifications et dimensionnement • Chaque cas test s’insère dans l’ensemble du cycle en V
Table of Content • Conception en Génie Electrique • Actionneur électromécanique • Réseau Electrique • Gestion énergétique
Messier – Bugati : Train d’atterrissage • Dimensionnement de la chaine de conversion électromécanique d’un train d’atterrissage • Spécifications fonctionnelles • Pré-dimensionnement de différentes structures • Construction d’une base de modèles haut niveau des actionneurs • Arbitrage en faveur de deux solutions (critères technico-économique) • Analyse et simulation des moteurs électriques • Construction d’une base de modèles de moteurs électriques • Dimensionnement « fin » des moteurs électriques • Validation des choix fonctionnels faits à l’étape précédente • Conception et validation du produit conçu par rapport au cahier des charges initial
Cycle en V pour un actionneur Besoins Produits Cahier des charges du cas test Intégration d’un prototype virtuel : Spécification des interfaces Validation des performances Simulation inverse acausale (possible grâce au outils SimPA2) Simulation directe causale (modèle identique à la simulation acausale) Modèles à nombre de paramètres d’entrée réduit Prototype virtuel Conception préliminaire : spécification des composants Constituants du système Conception de détail
Bilan de l’activité • La méthodologie de travail est parfaitement identifiée et formalisée • S’appuie sur le langage Modelica et les outils SimPA2 • Simulation acausale • Couplage multi-physique • Uniformisation du « langage » des acteurs • Accélérateur d’échange • Librairie d’actionneurs électromécaniques • Moteur • Réducteur • Rapport d’analyse du marché et des technologies actionneurs • Définition du cahier des charges pour le démonstrateur
Bilan de l’activité • Création des modèles électriques des composants de bases en Modelica (WP 1.1) • Création de composants d’électronique de puissance pour la simulation des convertisseurs de puissance les plus usités (WP 2.6) • Modèle de base pour le contrôle (WP 1.1) • Exploration de méthodes numériques pour adresser les problèmes électromécaniques (un jeu de système test a été défini qui est progressivement enrichi)
Etapes suivantes • Finalisation de la librairie de modèles fins de moteurs en Modelica (LAPLACE) • Exploitation des librairies dans l’environnement AMESim (LGMT/LAPLACE/IMAGINE • Points durs • Résolution de problèmes inverses dans AMESim • Rédaction des rapports de travail et articles scientifiques (LGMT/LAPLACE)
Table of Content • Conception en Génie Electrique • Actionneur électromécanique • Réseau Electrique • Gestion énergétique
Réseau électrique embarqué Branche 2 Branche 1 Branche 3 Cycles de fonctionnement, température ambiante Schéma d’implantation et Nomenclatures Spécifications fonctionnelles Validation des résultats et de la cohérence avec les spécifications Définition du réseau de bord Analyse des résultats et redéfinition de la conception Génération de la description en Modelica du réseau électrique SimPA2 traite le problème formel et résout les problématiques de grande taille Simulation électro-thermique
Bilan de l’activité • Intégration de la gestion des réseaux électriques complexes • Echange d’information entre SEE et AMESim • Génération du modèle de réseau électrique • Simulation dans AMESim • Post-processing visuel • Analyse des résultats et itérations • SimPA2 apporte les opérations de traitement formels et de simplifications des réseaux électrique (diminution des temps de simulation) • En cours: • construction des modèles thermiques de câbles (modelica) • Génération des circuits en modelica • Rendu 3D des résultats
Table of Content • Conception en Génie Electrique • Actionneur électromécanique • Réseau Electrique • Gestion énergétique
Gestion énergétique • Véhicule hybride: dimensionnement et définition de la stratégie de commande • Modélisation de la chaine électrique • Alternateur • Moteur • Convertisseurs statiques (modèles moyens et modèles exacts) • Analyse des stratégies de commande des machines • Dissociation des pertes moteurs et électroniques • Modèle et modèle expérimental (tables de mesures) • Conception fine des actionneurs et définition des stratégies de commande • Utilisation de Modelica pour la capacité multi physique • Cohabitation de différents niveaux de modèle (stratégie de gestion énergétique/commande des convertisseurs)
Contexte de l’application Commande à basse vitesse Découplage et Transformation dq to abc Commande vectorielle Commande à vitesse élevée Onduleur Transformation abc to dq Vitesse de base base MS Position Position • Conception détaillée des éléments • Stratégie de gestion énergétique dans le véhicule Génératrice Moteur • Loi de commande de l’électronique de puissance • Contrôle des machines électriques
Gestion énergétique d’un véhicule hybride Commande à basse vitesse Découplage et Transformation dq to abc Commande vectorielle Commande à vitesse élevée Onduleur Transformation abc to dq Vitesse de base base MS Position Position Intégration de l’ensemble et supervision Définition des cycles de test Choix des convertisseurs Dimensionnement des moteurs électrique Définition des lois de commande des parties électriques Conception détaillée de l’ensemble Echange de données sur les modèles identifiés en Modelica
Identification physique des moteurs en Modelica 60 Vitesse du véhicule (m/s) 60 40 Etat de charge de la batterie (%) 50 20 40 0 Temps(s) 30 -20 0 10 20 30 40 50 60 70 80 90 100 Temps(s) 20 600 Couple du moteur(Nm) 0 10 20 30 40 50 60 70 80 90 100 200 400 Courant de la batterie(A) 200 100 0 Temps(s) 0 -200 Temps(s) 0 10 20 30 40 50 60 70 80 90 100 Simulation de l’INRETS -100 0 10 20 30 40 50 60 70 80 90 100 Simulation actuelle
Bilan de l’activité • Application indus : modélisation de la chaîne de puissance électrique de la prius par des modèles analytiques • Génération des modèles moyens et exacts des convertisseurs statiques de puissance dans le langage Modelica (G2ELAB) • Génération des modèles de moteurs synchrones pour la commandes en modelica (CEDRAT) • Génération des modèles de BUSBAR (CEDRAT) pour la commutation de puissance • Construction des lois de contrôle moteur en Modelica (IMAGINE) • Apport de Modelica: • Modèles acausaux • Langage de communication • Traitement des problèmes électrique et de contrôle moteur dans AMESim • En cours: • Validation des modèles de moteurs modelica dans AMESiml • Intégration des modèles de commande moteurs