Download
1 / 6
70 likes | 248 Views
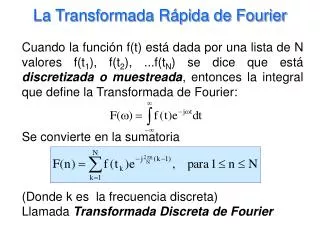
Matlab para obtener la Transformada Z. A partir de la versión 5.5 para estudiantes de MATLAB, se incluye un toolbox de matemática simbólica (TBMS), cuya estructura interna se basa en algoritmo de Mapple y con algunas limitaciones puede ser utilizado para evaluar la TZ de señales discretas.

E N D
Matlab para obtener la Transformada Z A partir de la versión 5.5 para estudiantes de MATLAB, se incluye un toolbox de matemática simbólica (TBMS), cuya estructura interna se basa en algoritmo de Mapple y con algunas limitaciones puede ser utilizado para evaluar la TZ de señales discretas. El uso de esta herramienta exige la declaración de las variables que deberan ser consideradas como símbolos. Esto se consigue utilizando el comando syms, seguido de la lista de variables. En el uso de esta herramienta es importante reconocer que en una expresión simbólica, MATLAB asume como variable independiente por defecto (vid) la más cercana a la letra x (minuscula). Si en una expresión compleja se tiene duda sobre cual es la vid, se puede recurrir ala función findsym(y,1), tal como se muestra a continuación: EDU>> Findsym(a*T+s/(k+3),1) Ans= s
Ejemplo 1 Verificar la transformadas T5, T9 y T11 de la tabla suministrada utilizando matematicasimbolica de MATLAB. %transformada T5 syms a k T xk=exp(-a*k*T), Xz=ztrans(xk) Xz=factor(Xz); pretty(Xz) %transformada T9 yk=sin(a*k*T) Yz=ztrans(yk), pretty(Yz) %transformada T11 aceptando w como vid syms a k T w z xk=exp(-a*k*T)*sin(w*k*T) X1z=ztrans(xk); X1z=factor(X1z); pretty(X1z) %transformada T11 forzando k como vid X2z=ztrans(xk,k,z); X2z=simplify(X2z), pretty(X2z)
xk = exp(-a*k*T) Xz = z/exp(-a*T)/(z/exp(-a*T)-1) z ------------- z - exp(-a T) yk = sin(a*k*T) Yz = z*sin(a*T)/(z^2-2*z*cos(a*T)+1) z sin(a T) --------------------- 2 z - 2 z cos(a T) + 1 xk = exp(-a*k*T)*sin(w*k*T) exp(-a k T) sin(k T) z ---------------------- 2 z - 2 z cos(k T) + 1 X2z = z*sin(w*T)*exp(-a*T)/(z^2-2*z*cos(w*T)*exp(-a*T)+exp(-2*a*T)) z sin(w T) exp(-a T) ----------------------------------------- 2 z - 2 z cos(w T) exp(-a T) + exp(-2 a T)
Ejemplo 2 Obtener la TZ de la siguiente señal, cuya expresión fue solicitada en el ejemplo grafico desarrollada en la clase anterior e(k)=0.25 k u(k) - 0.25 (k-4) u(k-4) %ejercico grafico de la clase anterior syms k uk=sym('Heaviside(k)'), ukm4=subs(uk,k,k-4) %creacion de e(k) como expresionsimbolica ek=0.25*k*uk-0.25*(k-4)*ukm4; %transformada z de e(k) Ez=ztrans(ek); Ez=factor(Ez); pretty (Ez)
uk = Heaviside(k) ukm4 = heaviside(k-4) 2 (z + 1) (z + 1) 1/4 ---------------- 3 (z - 1) z