Download

1 / 45
450 likes | 484 Views
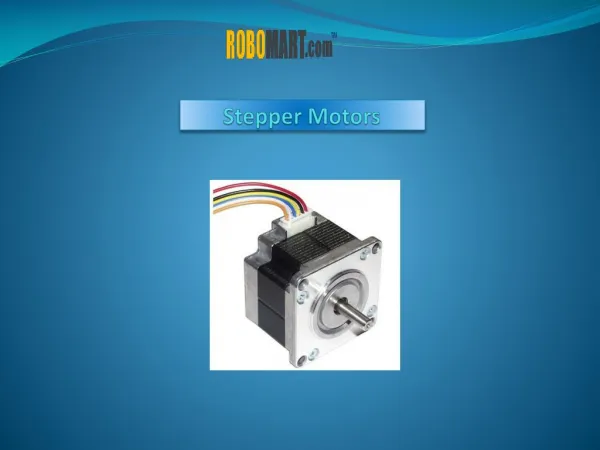
Stepper Motors. Stepper Motors. When incremental rotary motion is required in a robot, it is possible to use stepper motors

E N D
Stepper Motors • When incremental rotary motion is required in a robot, it is possible to use stepper motors • A stepper motor possesses the ability to move a specified number of revolutions or fraction of a revolution in order to achieve a fixed and consistent angular movement • This is achieved by increasing the numbers of poles on both rotor and stator • Additionally, soft magnetic material with many teeth on the rotor and stator cheaply multiplies the number of poles (reluctance motor)
Principles of operation S N Use of successive magnets
Stepper Motor Design • This figure illustrates the design of a stepper motor, arranged with four magnetic poles arranged around a central rotor • Note that the teeth on the rotor have a slightly tighter spacing to those on the stator, • this ensures that the two sets of teeth are close to each other but not quite aligned throughout
Use of successive magnets • Movement is achieved when power is applied for short periods to successive magnets • Where pairs of teeth are least offset, the electromagnetic pulse causes alignment and a small rotation is achieved, typically 1-2o
How Does A Stepper Motor Work? The top electromagnet (1) is charged, attracting the topmost four teeth of a sprocket.
How Does A Stepper Motor Work? (cont…) The top electromagnet (1) is turned off, and the right electromagnet (2) is charged, pulling the nearest four teeth to the right. This results in a rotation of 3.6°
How Does A Stepper Motor Work? (cont…) The bottom electromagnet (3) is charged; another 3.6° rotation occurs.
How Does A Stepper Motor Work? (cont…) The left electromagnet (4) is enabled, rotating again by 3.6°. When the top electromagnet (1) is again charged, the teeth in the sprocket will have rotated by one tooth position; since there are 25 teeth, it will take 100 steps to make a full rotation.
Reluctance (Stepper) Motors • angle control • slow • usually no feedback used • accurate positioning • without feedback, not servos • easy to control
Stepper Motor Types • A stepper motor can be incrementally driven, one step at a time, forward or backward • Steppermotor characteristics are: • Number of steps per revolution (e.g. 200 steps per revolution = 1.8° per step) • Max. number of steps per second (“stepping rate” = max speed) • Driving a stepper motor requires a 4 step switching sequence for full-step mode • Stepper motors can also be driven in 8 step switching sequence for half-step mode (higher resolution) • Step sequence can be very fast, then the resulting motion appears to be very smooth
Advantages of Stepper Motors • Stepper motors have several advantages: • Their control is directly compatible with digital technology • They can be operated open loop by counting steps, with an accuracy of 1 step. • They can be used as holding devices, • since they exhibit a high holding torque when the rotor is stationary
Stepper Motors Advantages and Disadvantages • Advantages • No feedback hardware required • Disadvantages • No feedback (!) Often feedback is still required, e.g. for precision reasons, since a stepper motor can “lose” a step signal. • Requires 2 H-Bridges plus amplifiers instead of 1 • Other • Driving software is different but not much more complicated • Some controllers (e.g. M68332) support stepper motors in firmware (TPU)
Electric Motors: Mounting • When used with rotary joint systems, motors can produce torque by: • being mounted directly on the joints • or by pulling on cables • The cables can be thought of as tendons that connect the actuator (muscle) to the link being moved • Since cables can apply force only when pulled, it is necessary to use a pair of cables to obtain bidirectional motion around a joint, • this implies mechanical complexity
Electric Motors: Mounting (cont…) • Mounting motors directly on joints allows for bidirectional rotation, • but such mounting may increase the physical size and weight of the joint, • and this may be undesirable in some applications
Electric Motors: Linear Movement • The fact that electric motors produce rotational motion raises an issue with regard to their use in robots • For linear translation it is necessary to translate rotational to linear motion • For example, prismatic joints require linear translation rather than rotation from the motor • Typically used to transform rotational to translational motion: • Leadscrews, • belt-and-pulley systems, • rack-and-pinion systems, • or gears and chains. Leadscrews
Motor and Encoder Motor and Encoder • Motor speed determined by: supplied voltage • Motor direction determined by: polarity of supplied voltage • Difficult to generate analog power signal (1A ..10A) directly from microcontroller → external amplifier (pulse-width modulation)
Motor and Encoder • Encoder disk is turned once for each rotor revolution • Encoder disk can be optical or magnetic • Single detector can determine speed • Dual detector can determine speed and direction • Using gears on motor shaft increases encoder accuracy
Encoder Feedback Another option: potentiometer US Digital
Pulse-Width Modulation • A/D converters are used for reading analog sensor signals • Why not use D/A converter for motor control? • Too expensive (needs power circuitry) • Better do it by software, switching power on/off in intervals • This is called “Pulse-Width Modulation” or PWM
Pulse-Width Modulation • How does this work? • We do not change the supplied voltage • Power is switched on/off at a certain pulse ratio matching the desired output power • Signal has very high frequency (e.g. 20kHz) • Motors are relatively slow to respond • The only thing that counts is the supplied power • ⇒ Integral (Summation) • Pulse-Width Ratio = ton / tperiod
Artificial Muscles • During the past forty years a number of attempts have been made to build artificial muscles • Muscles contract when activated, • since they are attached to bones on two sides of a joint, • the longitudinal shortening produces joint rotation • Bilateral motion requires pairs of muscles attached on opposite sides of a joint are required to produce
Artificial Muscles: McKibben Type • The McKibben muscle was the earliest attempt at constructing an artificial muscle • This device consisted of a rubber bladder surrounded by a sleeve made of nylon fibers in a helical weave • When activated by pressurized air, the sleeve prevented it from expanding lengthwise, and thus the device shortened like living muscles
Artificial Muscles: McKibben Type • In the 1960s there were attempts to use McKibben muscles to produce movements in mechanical structures strapped to nonfunctional arms of quadriplegics • The required compresses air was carried in a tank mounted on the person’s wheelchair • These experiments were never completely successful
Artificial Muscles: McKibben Type • Since the 1960s there has been several other attempts to develop improved McKibben type artificial muscles: • (Brooks, 1977) developed an artificial muscle for control of the arms of the humanoid torso Cog • (Pratt and Williamson 1995) developed artificial muscles for control of leg movements in a biped walking robot
Artificial Muscles: McKibben Type • However, it is fair to say that no artificial muscles developed to date can match the properties of animal muscles
Artificial Muscles: Shape Memory Alloys • Shape memory alloys (SMAs) have unusual mechanical properties • Typically, they contract when heated, • which is the opposite to what standard metals do when heated (expand) • Furthermore, they produce thermal movement (contraction) one hundred times greater than that produced by standard metals
Artificial Muscles: Shape Memory Alloys • Because they contract when heated, SMA provide a source of actuation for robots • After contraction, the material gradually returns to its original length when the source of activation is removed and it is allowed to cool • SMAs have two major problems when used as artificial muscles: • They cannot generate very large forces • They cool slowly and so recover their original length slowly, thus reducing the frequency response of any artificial muscle in which they are employed
Northeastern University’s Robot Lobster • A robot lobster developed at Northeastern University used SMAs very cleverly • The force levels required for the lobster’s legs are not excessive for SMAs • Because the robot is used underwater cooling is supplied naturally by seawater More on the robot lobster is available at: http://www.neurotechnology.neu.edu
Artificial Muscles: Electroactive Polymers • Like SMAs, Electroactive Polymers (EAPs) also change their shape when electrically stimulated • The advantages of EAPs for robotics are that they are able to emulate biological muscles with a high degree of toughness, large actuation strain, and inherent vibration damping • Unfortunately, the force actuation and mechanical energy density of EAPs are relatively low • Robotic face developed by a group led by David Hanson. More information is available at: • www.hansonrobotics.com