Download

1 / 14
250 likes | 1.55k Views
VECTORES. DÍA 19 * 1º BAD CT. VECTORES FIJOS. Un VECTOR FIJO AB es una entidad geométrica, un segmento orientado que tiene su origen en el punto A y su extremo en el punto B. Se caracteriza por tener: Punto de aplicación, A, dado por unas coordenadas.

E N D
VECTORES DÍA 19 * 1º BAD CT
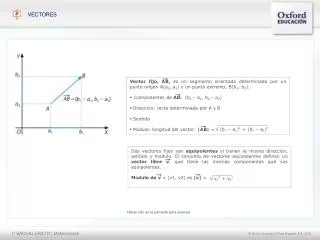
VECTORES FIJOS • Un VECTOR FIJO AB es una entidad geométrica, un segmento orientado que tiene su origen en el punto A y su extremo en el punto B. • Se caracteriza por tener: • Punto de aplicación, A, dado por unas coordenadas. • Dirección, que es la recta sobre la que se apoya. • Sentido, que es el indicado por la flecha del vector. • Módulo o intensidad, que es la medida desde el origen A al extremo B. • Vector v = AB Dirección B La flecha del vector indica su sentido. Nota: Se permite formalmente que, en lugar de una flecha sobre el nombre del vector, baste señalar dicho nombre en negrilla. Módulo = |v| A = Punto de aplicación
Vector fijo • Un vector fijo es un segmento orientado, de origen el punto A y extremo el punto B. t z w v u Ejemplo de cinco vectores diferentes: u, v, w, s, y t
Vector fijo • Un vector fijo es un segmento orientado, de origen el punto A y extremo el punto B. AB CD EF GH JK Ejemplo de cinco vectores diferentes.
EQUIPOLENCIA DE VECTORES • Dos vectores fijos AB y CD, no nulos, son equipolentes si tienen el mismo módulo, la misma dirección y el mismo sentido. • Se designan como: • AB ~ CD • Gráficamente, dos vectores no nulos y no alineados son equipolentes si al unir los orígenes y los extremos se obtiene un paralelogramo. B A D C
VECTORES LIBRES • Un vector libre es cada una de las clases en que queda clasificado el conjunto de los vectores fijos mediante la relación de equipolencia. • Dicha relación es de equivalencia al cumplir las propiedades: • Reflexiva: Todo vector fijo es equipolente a si mismo. • Simétrica: Si un vector fijo es equipolente a otro, éste es equipolente al primero. • Transitiva: Si un vector fijo es equipolente a un segundo, y éste es equipolente a un tercero, el primero es equipolente al tercero. v v v v v C
VECTORES LIBRES • Si al segmento le quitamos su punto de aplicación, A, se podrá mover libremente (desplazarse) sobre la recta que forma la Dirección. • Si además le permitimos desplazarse paralelamente a su Dirección, podrá ocupar todo el plano. • El vector tendrá una libertad de movimientos muy grande, aunque no podrá girar. Debido a dicha libertad de movimientos se denomina vector libre. • El módulo, dirección y sentido de un vector libre es el módulo, dirección y sentido de cualquiera de sus representantes. v v v v v
F B • Ejemplos de vectores equipolentes • Dos vectores son equipolentes si tienen el mismo módulo, direcciones paralelas y sentido. EF AB H GH E A P D G CD M PQ MN C Q • Los vectores AB y CD son equipolentes. • Igual que EF y GH . Y lo mismo pasa con MN y PQ. N
Coordenadas cartesianas • Un sistema de coordenadas cartesianas en V2 está formado por: • Dos rectas perpendiculares y graduadas, una horizontal y otra vertical, que se llaman ejes de coordenadas. • Los ejes de coordenadas dividen al plano en cuatro cuadrantes. • El punto donde se cortan los ejes se llama origen de coordenadas. • El eje horizontal se llama eje de abscisas o eje OX. • El eje vertical se llama eje de ordenadas o eje OY. • La unidad del eje de abscisas es el vector i. • La unidad del eje de ordenadas es el vector j. • La coordenada x, medida en el eje horizontal, es la abscisa del vector. • La coordenada y, medida en el eje vertical, es la ordenada del vector. y u j i x u = xi + yj
v = 5i + 3j v = (5,3) • Ejemplos de coordenadas de un vector • Sea el vector u = ai + bj u = (a, b) w = 2j w = (0, 2) t = - 4i+j t = (- 4, 1) u = 5i u = (5, 0) z = 2i – 3j z = ( 2, -3)
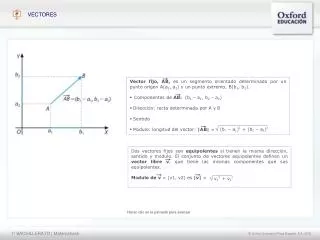
B(8, 5) • Ejemplo 1 • Sean los puntos A(6,2) y B(8,5) en la referencia euclídea R=(O,i,j) • Hallar las coordenadas del vector AB. • Podemos poner: • OA+AB=OB • a+AB=b • De donde: • AB = b – a • AB=(8, 5) – (6,2) = • = (8 – 6 , 5 – 2)= (2,3) AB =(2,3) A(6, 2) O
A(4, 0) O • Ejemplo 2 • Sean los puntos A(4,0) y B(8,-6) en la referencia euclídea R=(O,i,j) • Hallar las coordenadas del vector AB. • Podemos poner: • OA+AB=OB • a+AB=b • De donde: • AB = b – a • AB=(8, – 6) – (4,0) = • = (8 – 4 , – 6 – 0)= (4, – 6) AB=(4, –6) B(8, -6)
A(5, 2) • Ejemplo 3 • Un vector fijo tiene su origen en el punto A(5, 2) y sus coordenadas son (- 3, - 4). Hallar las coordenadas de su extremo B. • Podemos poner: • OA+AB=OB • a+AB=b • De donde: • b = AB + a • b=(– 3 , – 4) + (5, 2) = (2 , – 2) O AB=(– 3, –4) B(2, -2)
MÓDULO Y ARGUMENTO • MÓDULO • Módulo de un vector u , |u|, es su longitud. • |u|=√(x2+y2) • ARGUMENTO • Argumento de un vector u, α, es el menor de los ángulos que forma con el eje positivo de abscisas. • arg(u) = α = arctg (y/x) u yj |u|=√(x2+y2) α = arctg (y/x) j i xi