Download
1 / 18
250 likes | 750 Views
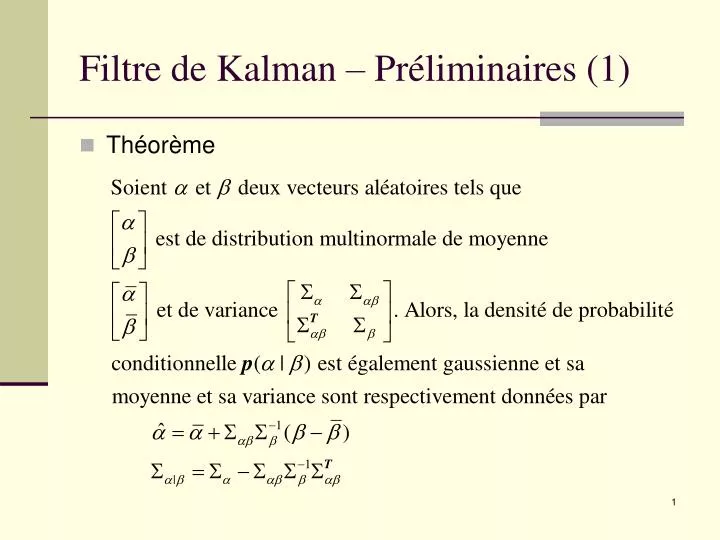
Filtre de Kalman – Préliminaires (1). Théorème. Filtre de Kalman – Préliminaires (2). Estimateur à variance minimale Estimer constante, a, telle que est minimale Résultat: En effet: . Filtre de Kalman – Préliminaires (3).

E N D
Filtre de Kalman – Préliminaires (1) • Théorème
Filtre de Kalman – Préliminaires (2) • Estimateur à variance minimale Estimer constante, a, telle que est minimale Résultat: En effet:
Filtre de Kalman – Préliminaires (3) • Meilleur estimateur non linéaire de la variable x en termes de y y et x deux variables aléatoires; densité de probabilité conjointe f(x,y). Estimer x par une fonction g(y) de sorte que est minimale Résultat:
Filtre de Kalman – Préliminaires (4) • Démonstration
Filtre de Kalman – Modèle et hypothèses (1) • Système décrit par modèle en variables d’état
Filtre de Kalman – Formulation du problème • Problème: Déterminer l’estimateur de variance minimale de l’état à l’instant k étant donné les mesures jusqu’à l’instant k-1, c-à-d tel que
Filtre de Kalman • Considérons le modèle en variables d’état ci-dessus et définissons
Filtre de Kalman – Démonstration(1) • Equations d’état du système
Filtre de Kalman – Démonstration (2) • Variance
Filtre de Kalman – Démonstration (3) • Par application du théorème (Préliminaire (1)) - Moyenne
Filtre de Kalman – Démonstration (4) • Variance
Filtre de Kalman - Innovation • Prédiction de y(k) • Innovation
Filtre de Kalman permanent (1) • Sous conditions données à la page suivante, • Filtre prend la forme
Filtre de Kalman permanent (2) • Théorème Soit L tel que . Si les 3 conditions suivantes sont remplies: 1) (A,L) stabilisable 2) (C,A) détectable 3) Alors
Filtre de Kalman permanent (3) • Variance de l’erreur d’estimation minimisée asymptotiquement, c-à-d
Filtre de Kalman – Défaut présent (1) • Equations système supervisé + filtre de Kalman en présence d’un défaut • En l’absence de défaut, solution
Filtre de Kalman – Défaut présent (2) • Donc L (r(k))=N (
Bibliographie • G.C. Goodwin et K.S. Sin. Adaptive filtering, prediction and control. Prentice-Hall, 1984 • A. Papoulis. Probability, random variables and stochastic processes. McGraw Hill, 1965 • R.S. Mangoubi. Robust estimation and failure detection: a concise treatment Springer 1998