Download
1 / 29
290 likes | 457 Views
“Sky Rockets in Flight”. Experimental Engineering Section 1,Team 3 Student 1, Student 2, Student 3, Student 4 May 5, 2008. Objectives. Develop problem solving and critical thinking skills Utilize various disciplines of engineering Analyze and predict the flight of a rocket.

E N D
“Sky Rockets in Flight” Experimental Engineering Section 1,Team 3 Student 1, Student 2, Student 3, Student 4 May 5, 2008
Objectives • Develop problem solving and critical thinking skills • Utilize various disciplines of engineering • Analyze and predict the flight of a rocket.
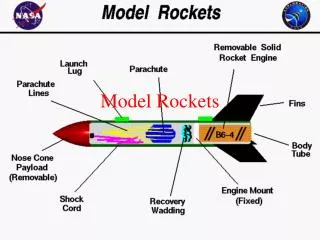
Prior to Launch • Sensors Need to be Calibrated • Accelerometers, Gyroscopes, Pitot Tube, Pressure Sensor • Physical Characteristics • Coefficients of Lift and Drag • Natural frequencies of rocket body • Motor Quantities • Thrust Curve and Total Impulse for Modeling
Flight Modeling • Calculate instantaneous acceleration: • Thrust Curve • Gravity • Lift (from wind) • Drag • Weather Cocking • Euler’s Method to find trajectory • Algorithm checked using RockSim
Algorithm Fthrust=Instantaneous thrust from motor θ=angle from vertical g = acceleration from gravity A = cross sectional area ρ=air density Ix=Moment of Inertia about x axis cD=drag coefficient cL=lift coefficient V=velocity α=angular acceleration W=wind speed d= distance between CM and CP
Launches • Lucerne Valley, CA --- dry lake bed • 4/19 - Large IMU & Small IMU • Windy (15-25 mph) • 4/26 - Large IMU & Large Vibration • No wind
IMU Sensors • Getting global coordinates from local coordinates • Calibration for IMU
4/19/08 IMU Height Graph: Apogee @ 5.20 sec & 166 m Predicted (RockSim): Apogee @ 6.17 sec & 183 m Predicted (MATLAB): Apogee @ 5.94 sec & 171 m
4/26/08 IMU Height Graph: Apogee @ 4.98 sec &181 m Predicted (RockSim): Apogee @ 6.17 sec & 183 m Predicted (MATLAB): Apogee @ 5.97 sec & 172 m
Integration Errors • Euler’s Method • Dead Reckoning Error Acceleration
Pressure Altimeter • Pressure decreases with altitude • (1) • No Dead Reckoning Error • Poor Sensitivity
Sensor 1, 7, 12 Detrend Sampled Data 200 Sensor 1 Sensor 7 150 sensor 12 100 50 Strain Voltage Output 0 -50 -100 -150 0 0.05 0.1 0.15 0.2 0.25 Time (sec) Vibration Analysis • Periods with limited external influence • Analyze short segments with FFT
Frequency Analysis • Sampling frequency too low (200 Hz). • Fundamental frequency folded.
Failed Flight… • Small IMU parachute did not deploy, rocket went into a fatal flat spin. • Pitot, Pressure: No activity. • Accelerometers: Activity stops at t=0.
…Failed Flight • Gyroscopes: unexpected activity before and after launch
Conclusions • IMU: Accurate measurement, but limited by the low sampling frequency • Vibration: Shows the expected reaction • vibration occurred at same frequency as dynamic beam experiment
Recommendations • GPS • Higher sampling frequency in IMU and RDAS • Looking at all 15 strain gauges at once • Use the same IMU all semester
Acknowledgements Student Proctors Rocket Development Team Professor Spjut Professor Miraghie The Rest of the Engineering Faculty System Admin Stockroom Curator
References • 1. Anonymous "Model Rocket Safety Code," http://www.nar.org/NARmrsc.html. • 2. Qimin Yang, “Pressure sensors and thermistors,” http://www.eng.hmc.edu/NewE80/PresTempLec.html. • 3. Student 5, E80 Section 4, Team 2 • 4. Phillip D. Cha and John I. Molinder, Sampling and Data Acquisition, in Fundamentals of Signals and Systems: A Building Block Approach, edited by Anonymous (Cambridge University Press, New York, 2006), pp. 86-88. • Anonymous, “Accelerometer and Gyroscope Calibration,” http://www.eng.hmc.edu/NewE80/AccelGyroLab.html. • Anonymous, “Integrated Dual-Axis Gyro,” http://www.eng.hmc.edu/NewE80/PDFs/IDG_300_Datasheet.pdf • Anonymous, “Analog Devices,” • http://www.eng.hmc.edu/NewE80/PDFs/ADXL320.pdf • Colin Holland, “Tri-axi inertial measurement unit combines seven sensors,” http://www.eetimes.eu/industrial/199905290 • Mary Cardenas, “Rocket Dynamics,” http://www.eng.hmc.edu/NewE80/PDFs/rocket_dynamics.pdf.
Aliasing • Sampling Theorem: