Download
1 / 31
320 likes | 537 Views
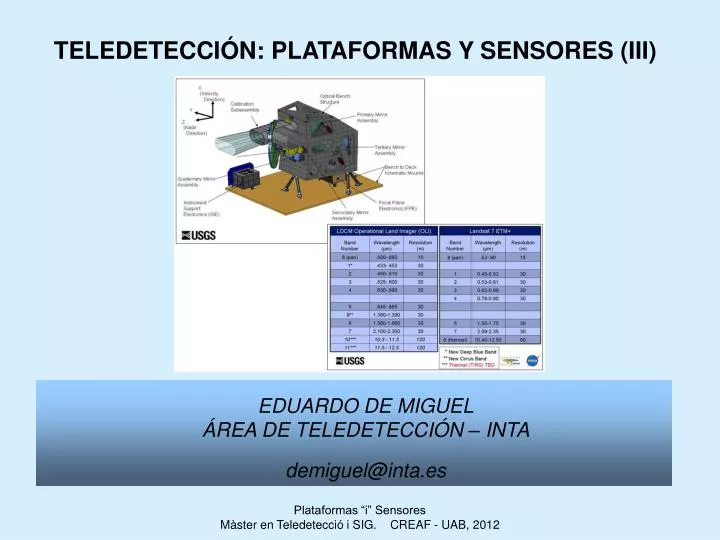
TELEDETECCIÓN: PLATAFORMAS Y SENSORES (III). EDUARDO DE MIGUEL ÁREA DE TELEDETECCIÓN – INTA demiguel@inta.es. Resumen óptica. Crear una imagen exige enfocar y acumular fotones. 1 ) Enfocar es llevar los rayos que provienen de un punto a un único punto (o casi) en el detector.

E N D
TELEDETECCIÓN: PLATAFORMAS Y SENSORES (III) EDUARDO DE MIGUEL ÁREA DE TELEDETECCIÓN – INTA demiguel@inta.es
Resumen óptica • Crear una imagen exige enfocar y acumular fotones. • 1 ) Enfocar es llevar los rayos que provienen de un punto a un único punto (o casi) en el detector. • Todos los rayos que llegan paralelos se enfocan en un plano = plano focal. • En observación de la Tierra es posible asumir que todos los puntos envian sus rayos paralelos. • 2) Para acumular fotones podemos: • recoger más rayos incrementando Da/f (ángulo sólido↑). • durante más tiempo (int_time↑). • en un rango mayor de longitudes de onda. • juntar las medidas de más puntos (IFOV ↑). 3) Incrementar Da/f sin perjudicar a la resolución espacial es un reto para el diseño óptico.
Resumen sensores • Radiómetro = telescopio (+ dispersión) + detector • 1) Telescopio (enfocar + acumular radiación): • refracción -> lentes • reflexión -> espejos • 2) Dispersión • filtros • rejillas de difracción • 3) Detección: Individuales/grupitos vs CCD (lineal o 2-D) • En el TIR la radiación se comporta igual, pero: • lentes problemáticas => espejos • detectores deben estar enfriados => limitaciones
AHS: VNIR vs TIR Vis/NIR Térmico (AHS75)
Resumen sensores • Radiómetros: dos maneras fundamentales de formar imagen (en avión o satélite LEO) • Pushbroom: detectores cubriendo todo el ancho de imagen y definiendo el IFOV • Linescanners (= whiskbroom = espejo giratorio): detector(es) solo en un punto del swath, algún otro elemento define el IFOV.
CARACTERIZACIÓN DE UN INSTRUMENTO / MISIÓN DE TELEDETECCIÓN
CARACTERIZACIÓN: DEFINICIONES • La cobertura es el rango de valores de la magnitud bajo estudio que el instrumento puede registrar. • Exactitud es la diferencia entre el valor real de un magnitud y el valor obtenido por un instrumento. • Precisión es la medida de la resolución del instrumento, es decir su capacidad para discriminar diferencias pequeñas en la magnitud medida • La exactitud requiere una calibración adecuada del instrumento. • La precisión es inherente a su diseño.
CARACTERIZACIÓN ESPACIAL (GEOMÉTRICA) RESOLUCION ESPACIAL La resolución espacial es en primera aproximación el llamado "tamaño de pixel", o área de terreno correspondiente a un pixel en la imagen => proyección del IFOV (Instantaneous Field Of View) sobre el terreno (Ground IFOV = GIFOV). GIFOVx = 2 H tan(IFOV/2) sec2 () H IFOV sec2 () GIFOVy = 2 H tan(IFOV/2) sec () H IFOV sec () (despreciando el efecto de curvatura de la Tierra) A veces se utiliza la distancia entre dos centros de pixels en la imagen (Ground Sampling Distance). En linescanners no tiene por qué ser idéntica al GIFOV (típicamente es algo menor).
CARACTERIZACIÓN ESPACIAL (GEOMÉTRICA) RESOLUCION ESPACIAL: MTF / PSF Todo sistema óptico es incapaz de registrar fielmente un punto (matemáticamente una función delta de Dirac). Esto es debido a la suma de (como mínimo) difracción y aberraciones ópticas. La imagen de un punto es una mancha o "borrón", de ancho variable según la calidad del sistema = Point Spread Function Radio de la mancha de difracción: 1.22 / Da
CARACTERIZACIÓN ESPACIAL (GEOMÉTRICA) RESOLUCION ESPACIAL: MTF / PSF Una medida de la reducción del contraste causada por un sistema óptico es el cociente entre la modulación en la escena real y la registrada en la imagen. modulación = Amplitud/media = (max-min) / (max+min) Si calculamos este cociente para cada frecuencia espacial presentes en la imagen tenemos la MTF del sistema óptico Se cumple que MTF = |FT(PSF)|
CARACTERIZACIÓN ESPACIAL (GEOMÉTRICA) • RESOLUCION ESPACIAL • Otras magnitudes de interés: • resolución en alcance (LIDAR, RADAR, etc) • co-registro espectral en sensores con diferentes planos focales • diferencia en el tamaño de pixel dentro de la imagen • ...
CARACTERIZACIÓN ESPACIAL (GEOMÉTRICA) EXACTITUD ESPACIAL Nos informa de la diferencia entre la posición cartográfica de un dato, en X,Y y eventualmente Z, y su posición real (o al menos de referencia). En origen, la exactitud viene determinada por: -apuntamiento -efemérides -corregistro La exactitud espacial final en la imagen, al igual que algunos otros parámetros, es variable dependiendo de los procesos que haya sufrido la imagen.
CARACTERIZACIÓN ESPECTRAL RESOLUCION ESPECTRAL Tamaño de las regiones espectrales que se pueden medir separadamente. El valor indicado como límite de banda puede corresponder al intervalo que contiene el 95% de la potencia recibida, o quizás el 99%, o las longitudes de onda donde encontramos una respuesta igual a la mitad de la respuesta máxima (FWHM, "Full Width Half Maximum")... El rango de resoluciones encontrado es desde 1.5 nm (espectrómetros), pasando por 10 nm (banda estrecha) y 100 nm (banda ancha) hasta varias micras en sensores térmicos.
CARACTERIZACIÓN ESPECTRAL RESOLUCION ESPECTRAL Una magnitud útil para visualizar la resolución espectral es , (cociente entre la longitud de onda central y el ancho del canal. Esto es debido a que la energía de la radiación no es constante con la longitud de onda, sino que aumenta con la frecuencia de la radiación: la energía de un fotón es: E = h donde h es la constante de Planck (6.62 10-34 j s) y la frecuencia del fotón (s-1). Al ser mayor la energía a longitudes de onda menores, un canal estrecho en el azul tiene una sensibilidad mayor que un canal del mismo ancho en el térmico. = c/ !!!
CARACTERIZACIÓN ESPECTRAL EXACTITUD ESPECTRAL La posición exacta de cada banda depende de la calidad del sistema de dispersión utilizado (prisma / red de difracción), de deformaciones termomecánicas en vuelo... La detección de rasgos espectrales (spectral features) estrechos requiere una alta exactitud espectral. Se suele requerir < 2 nm. Habitualmente no va a ser un problema en el análisis de los datos de teledetección.
CARACTERIZACIÓN ESPECTRAL COBERTURA ESPECTRAL Los sistemas whiskbroom (TM, MODIS, AVHRR, METEOSAT, AHS...) pueden cubrir fácilmente desde el visible al térmico. -óptica pequeña, fácil para espejos y lentes TIR -detector pequeño, que es relativamente fácil de enfriar Los sistemas de empuje (HRV-SPOT, MERIS, CASI...), de óptica y planos focales mayores, no se han utilizado hasta ahora para cubrir más allá de las 2.5 micras.
CARACTERIZACIÓN RADIOMÉTRICA La resolución radiométrica de un instrumento es el mínimo incremento en radiancia recibida por el sensor (Ls) que registra. Esta cantidad viene dada por el valor más limitante entre el Ls correspondiente a una unidad digital en la imagen de salida, y el ruido. • Ruido: variabilidad de la señal que no corresponde a información del objeto estudiado • Fuentes de ruido instrumental: • detector (corriente oscura, lectura) • electrónica (amplificadores, interferencias...) • digitalización
CARACTERIZACIÓN RADIOMÉTRICA El ruido podemos interpretarlo como el cambio en la radiancia recibida por el instrumento que equivale a su ruido: NEdL (Noise Equivalent (delta) radiance) cambio en la reflectancia del objeto que origina una señal equivalente a su ruido: NEd. En radiómetros térmicos es frecuente convertir el ruido en una variación en temperatura, y especificar así su resolución radiométrica como NEdT.
CARACTERIZACIÓN RADIOMÉTRICA SNR: cociente entre la información y el ruido SNR = media / std = valor esperado / fluctuación = Ls / NEdL es necesario especificar con qué Ls (min, ref, max...) se mide la SNR La SNR, el ruido, la resolución radiométrica... son diferentes aspectos del problema básico del teledetector: "¿cuál es la mínima diferencia que puedo detectar?"
CALIBRACIÓN RADIOMÉTRICA Se realiza inicialmente en laboratorio, se sigue con datos de campo. La calibración del instrumento solo puede garantizar la exactitud en la medida de Ls. Para una exactitud en ρ / T / Єes necesario considerar la interferencia atmosférica. Requisito habitual (¡impuesto por los usuarios!): 1% → 5% en radiancia / reflectancia / emisividad < 1ºC en temperatura La calibración radiométrica es problemática en los sensores en satélite por la degradación de óptica y detectores: hay que estar atentos para el correcto uso de las imágenes.
CARACTERIZACIÓN RADIOMÉTRICA COBERTURA RADIOMETRICA El rango de energía que se encuentra un instrumento de teledetección es muy variable: Ls Irr/pi * ρ Ls C1/(5 *[exp(C2/(T)-1)]) El rango dinámico del instrumento informa de cuáles son los valores mínimos y máximos que puede interpretar correctamente. Típicamente, por debajo del mínimo el instrumento no responde o el ruido domina sobre la señal, y por encima se satura o deja de responder linealmente. ρ(%) [0...60...90] cos(z) [0...90] T (K) [-70...,270 , +350, ... +1000]
1.2 * Ls (ρ = 0.7, θz = 27.5º) CARACTERIZACIÓN RADIOMÉTRICA COBERTURA RADIOMETRICA - Algunos ejemplos ASTER-2 @ 0.66....................0 - 358 W/(m2 sr µm) MSG VIS @ 0.6......................0 - 533 W/(m2 sr µm) MSG IR @ 10.8......................0 - 335 K AVHRR-4 @ 10.8...............180 - 335 K ...pero muchas veces es difícil encontrar esta información directamente en las especificaciones.
CARACTERIZACIÓN TEMPORAL Resolución y calibración, en el sentido de esta exposición, no son un problema. La COBERTURA TEMPORAL es de dos tipos 1) la repetitividad, o muestreo temporal. Desde datos cada 30 minutos (METEOSAT) a datos cada casi 30 días (26 nominal SPOT) 2) la continuidad de los datos, importante para el seguimiento a medio plazo de fenómenos con evolución en periodos de años (cambios de uso del suelo, por ejemplo). Desde misiones "puntuales" (ENVISAT) hasta series de muy larga duración (AVHRR)
CARACTERIZACIÓN TEMPORAL 2838 km Δ sucessive orbits (0º lat) 108 km Δ adjacent ground tracks Revisita "orbital": 86400/T = Tn + D/R Tn: nº de orbitas enteras por día D = drift (deriva) R = repetition cycle Ingenio: 670 km => 14.65 ≈ 14+32/49 (718 órbitas/ciclo) SPOT5: 822 km => 14.2 ≈ 14 + 5/26 Formosat-2: 888 km => 14.0
CARACTERIZACIÓN TEMPORAL Revisita Ingenio: orbit: 49-days repeat cycle global geometric accessibility time (with max OZA < 35°) less than 3 days (TBC), for the overall duration of the mission global geometric accessibility time (with max OZA < 5°) less than 30 days (TBC), for the overall duration of the mission
REVISIÓN DE MISIONES/INSTRUMENTOS DE OT AATSR - ATSR (ENVISAT - ERS2) ALI (EO-1) ASAR (ENVISAT) ASCAT (METOP) ASTER (TERRA) AVHRR-2, AVHRR-3 (NOAA polar series) AVNIR-2 (ALOS) ... http://www.eohandbook.com http://directory.eoportal.org