Download
1 / 1
10 likes | 164 Views
(Fuzzy Logic Inferencing Pong). Objectives. Methods. Results. Create Simulation Observe Human Collaboration: Tennis Matches Create Fuzzy Inference System Models Human-Like Behavior Beta Testing Compile Results. Create a doubles PONG game with: Advanced ball control

E N D
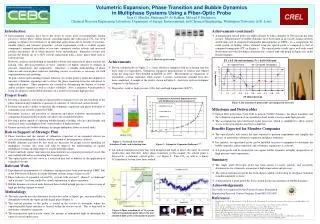
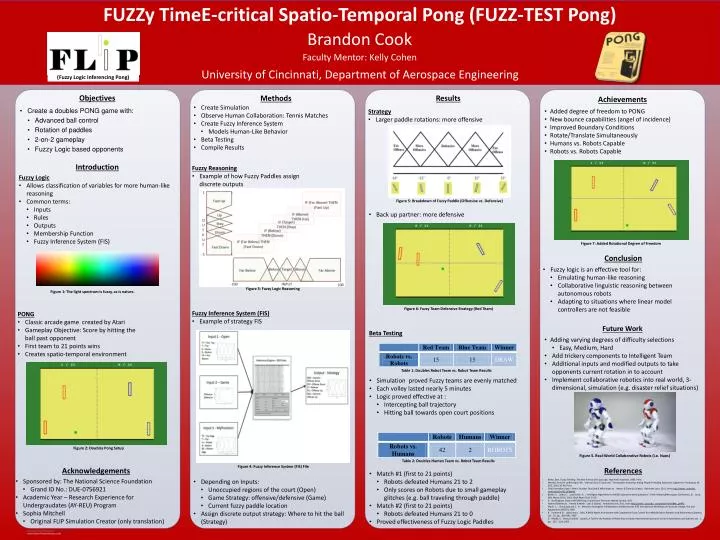
(Fuzzy Logic Inferencing Pong) Objectives Methods Results • Create Simulation • Observe Human Collaboration: Tennis Matches • Create Fuzzy Inference System • Models Human-Like Behavior • Beta Testing • Compile Results Create a doubles PONG game with: • Advanced ball control • Rotation of paddles • 2-on-2 gameplay • Fuzzy Logic based opponents University of Cincinnati, Department of Aerospace Engineering Added degree of freedom to PONG New bounce capabilities (angel of incidence) Improved Boundary Conditions Rotate/Translate Simultaneously Humans vs. Robots Capable Robots vs. Robots Capable FUZZyTimeE-critical Spatio-Temporal Pong (FUZZ-TEST Pong) Achievements Brandon Cook Faculty Mentor: Kelly Cohen • Strategy • Larger paddle rotations: more offensive • Fuzzy Reasoning • Example of how Fuzzy Paddles assign discrete outputs Introduction Figure 5: Breakdown of Fuzzy Paddle (Offensive vs. Defensive) • Fuzzy Logic • Allows classification of variables for more human-like reasoning • Common terms: • Inputs • Rules • Outputs • Membership Function • Fuzzy Inference System (FIS) • Back up partner: more defensive Figure 7: Added Rotational Degree of Freedom Conclusion • Fuzzy logic is an effective tool for: • Emulating human-like reasoning • Collaborative linguistic reasoning between autonomous robots • Adapting to situations where linear model controllers are not feasible Figure 3: Fuzzy Logic Reasoning Figure 6: Fuzzy Team Defensive Strategy (Red Team) • Fuzzy Inference System (FIS) • Example of strategy FIS • PONG • Classic arcade game created by Atari • Gameplay Objective: Score by hitting the ball past opponent • First team to 21 points wins • Creates spatio-temporal environment Figure 1: The light spectrum is fuzzy, as is nature. Future Work Beta Testing Adding varying degrees of difficulty selections • Easy, Medium, Hard Add trickery components to Intelligent Team Additional inputs and modified outputs to take opponents current rotation in to account Implement collaborative robotics into real world, 3-dimensional, simulation (e.g. disaster relief situations) Table 1: Doubles Robot Team vs. Robot Team Results • Simulation proved Fuzzy teams are evenly matched • Each volley lasted nearly 5 minutes • Logic proved effective at : • Intercepting ball trajectory • Hitting ball towards open court positions Figure 2: Doubles Pong Setup Figure 5. Real-World Collaborative Robots (i.e. Naos) Table 2: Doubles Human Team vs. Robot Team Results Figure 4: Fuzzy Inference System (FIS) File References Acknowledgements • Match #1 (first to 21 points) • Robots defeated Humans 21 to 2 • Only scores on Robots due to small gameplay glitches (e.g. ball traveling through paddle) • Match #2 (first to 21 points) • Robots defeated Humans 21 to 0 • Proved effectiveness of Fuzzy Logic Paddles • Sponsored by: The National Science Foundation • Grand ID No.: DUE-0756921 • Academic Year – Research Experience for Undergraudates (AY-REU) Program • Sophia Mitchell • Original FLIP Simulation Creator (only translation) • Depending on Inputs: • Unoccupied regions of the court (Open) • Game Strategy: offensive/defensive (Game) • Current fuzzy paddle location • Assign discrete output strategy: Where to hit the ball (Strategy) • Kosko, Bart. Fuzzy Thinking: The New Science of Fuzzy Logic. New York: Hyperion, 1993. Print. • Mendel, Jerry M., and Dongrui Wu. "Interval Type-2 Fuzzy Sets." Perceptual Computing: Aiding People in Making Subjective Judgments. Piscataway, NJ: IEEE, 2010. 35-64. Print. • 2010 Australian Open – Men’s Doubles Final Bob & Mike Bryan vs. Nestor & Zimonjic [video]. Retrieved June, 2011, from http://www. youtube. com/watch?v=0C-pEt8d9ts • Barker, S. , Sabo, C. , and Cohen, K. , "Intelligent Algorithms for MAZE Exploration and Exploitation", AIAA Infotech@Aerospace Conference, St. Louis, MO, March 29-31, 2011, AIAA Paper 2011-1510. • D. Buckingham, Dave’s MATLAB Pong, University of Vermont, Matlab Central, 2011 • Federer & Mirka vs. Hewitt & Molik – part 3 [video]. Retrieved June, 2011, from http://www. youtube. com/watch?v=b0BAh_pRRTo • Sng H. L. , Sen Gupta and C. H. Messom, Strategy for Collaboration in Robot Soccer, IEEE International Workshop on Electronic Design, Test and Applications (DELTA), 2002 • B. Innocenti, B. Lopez and J. Salvi, A Multi-Agent Architecture with Cooperative Fuzzy Control for a Mobile Robot, Robotics and Autonomous Systems, vol. 55, pp. 881-891, 2007 • D. Matko, G. Klancar and M. Lepetic, A Tool for the Analysis of Robot Soccer Game, International Journal of Control, Automation and Systems, vol. 1, pp. 222 – 228, 2003