Download
1 / 7
70 likes | 83 Views
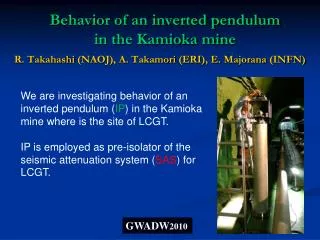
The Real Stabilizability Radius of the Multi-Link Inverted Pendulum. Connections 2006 ECE Graduate Symposium Presenter: Simon Lam Supervisor: Professor E. J. Davison Systems Control Group, ECE University of Toronto Date: June 9, 2006. Introduction. classic problem in control theory

E N D
The Real Stabilizability Radius of the Multi-Link Inverted Pendulum Connections 2006 ECE Graduate Symposium Presenter: Simon Lam Supervisor: Professor E. J. Davison Systems Control Group, ECE University of Toronto Date: June 9, 2006
Introduction • classic problem in control theory • widely used as a benchmark for testing control algorithms
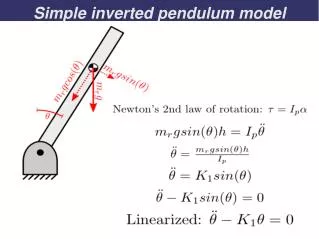
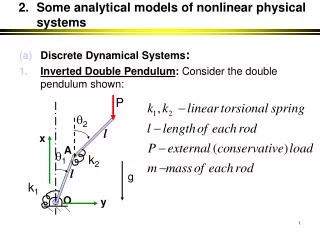
Mv θv Lv M2 θ2 L2 M1 θ1 L1 u Properties of a v-link Inverted Pendulum Linearized Model: System is stabilizable for any number of links Can design a controller to (locally) stabilize a pendulum with any number of links!
Gap • Of course, in reality, we can’t stabilize an inverted pendulum with too many links. • Possible factors? • Nonlinear effects (e.g. friction) • Initial conditions • Sensitivity to physical disturbances Conjecture: real stabilizability radius is too small
Real Stabilizability Radius • Given a stabilizable LTI system: the real stabilizability radius measures the smallest such that the perturbed system: is no longer stabilizable.