Download
1 / 20
340 likes | 796 Views
Filtrage de Kalman. Application au suivi des paramètres de problèmes de vision. 1/90. Cadre de l’étude. Un système physique. Distinction entre paramètres: qui modélisent le système que l’on peut mesurer. Estimer les premiers à partir des seconds. Cadre de l’étude.

E N D
Filtrage de Kalman Application au suivi des paramètres de problèmes de vision 1/90
Cadre de l’étude • Un système physique. • Distinction entre paramètres: • qui modélisent le système • que l’on peut mesurer. • Estimer les premiers à partir des seconds.
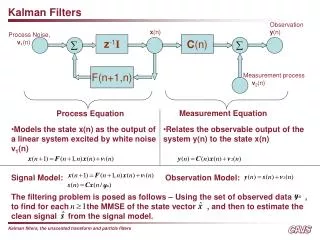
Cadre de l’étude Les paramètres mesurables observation xi Les paramètres internes (décrivant le modèle) vecteur d’état si
Prise en compte des incertitudes • Les mesures sont imprécises/incertaines • Le modèle est simpliste • On veut savoir la fiabilité d’une estimation si de l’état courant si. ce que le filtre de Kalman permet.
Formalisation: mesure et vecteur d’état • On a accès a: • bruit blanc additif et: • Evolution du modèle: • Modèle « lâche »:
Formalisation: mesure et vecteur d’état • Filtrage de Kalman: processus itératif d’estimation du vecteur • Estimation à l’instant i: • traduit la confiance que l’on a en l’estimation • Si on connaît , la meilleure estimation possible de est:
Formalisation: les équations de mesures • Liens entre les observations et le vecteur d’état: • Cas linéaire:
Formalisation: les équations de mesures • Dans le cas non-linéaire, on s’y ramène: développement de Taylor à l’ordre 1 de • on a bien:
L’algorithme • 3 étapes, propagation des incertitudes. • Initialisation: • Prédiction: • Calcul du gain de Kalman: • Mise à jour: • Un pas du filtre.
Algorithme: interprétation • Compromis entre la contribution de la prédiction et de la mesure: • On peut réécrire: • Grande incertitude sur le vecteur d’état « grande » « grand » innovation favorisée. • Grande incertitude sur la mesure « grande » « petit » prédiction privilégiée.
Algorithme: améliorations possibles • Filtres de Kalman itérés • Globalement • Localement • Objectif: limiter l’influence des linéarisations
Utilisation pour l’estimation robuste • Réjection des mesures aberrantes: v.a. gaussienne de moyenne nul, de covariance • Distance de Mahalanobis associée: • Seuil de réjection tel que:
Applications • Suivi de la trajectoire d’une particule dans le plan • Estimation des paramètres d’une ellipse à partir d’un nuage de points • Suivi des paramètres externes d’une caméra en trou d’épingle.
Suivi de la trajectoire d’une particule dans le plan • Le système: mouvement à accélération constante • Equation de mesures: • Incertitude: Meyer a montré que
Suivi de la trajectoire d’une particule dans le plan • Résultats: • influence des incertitudes • influence des incertitudes • Réjection des valeurs aberrantes
Estimation des paramètres d’une ellipse à partir d’un nuage de points • Vecteur d’état: • Mesures: (points du nuage) • Equations de mesures:
Estimation des paramètres d’une ellipse à partir d’un nuage de points • résultats • comparaison filtre classique / itéré localement 1 • comparaison filtre classique / itéré localement 2 • Mais des fois…
Suivi des paramètres externes d’une caméra en trou d’épingle. • Rappel - modèle de caméra: • Calibrage…
Suivi des paramètres externes d’une caméra en trou d’épingle. • Une caméra en mouvement autour d’un cube. exemple • 2 possibilités: • suivi sur les points 2D, puis estimation de P (svd) grâce aux 8 correspondances 2D 3D • Résultats 1 | 2 • Suivi sur les paramètres (R,t): • rotation 3 angles • translation 3 composantes • Résultats 1 | 2
Suivi des paramètres externes d’une caméra en trou d’épingle. • La suite …