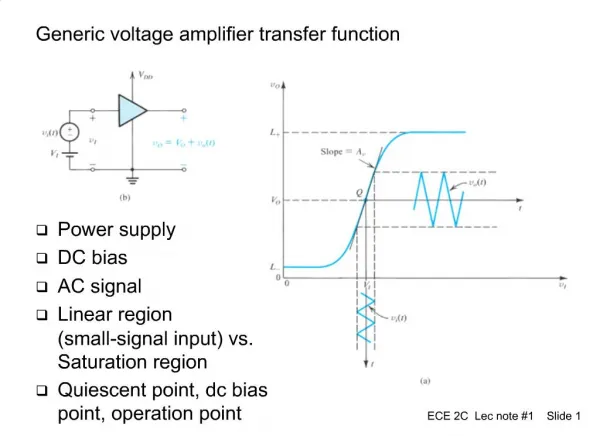
Download
1 / 19
190 likes | 358 Views
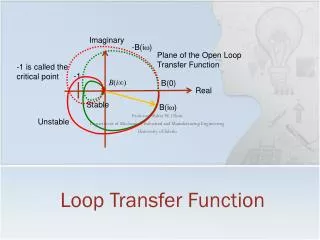
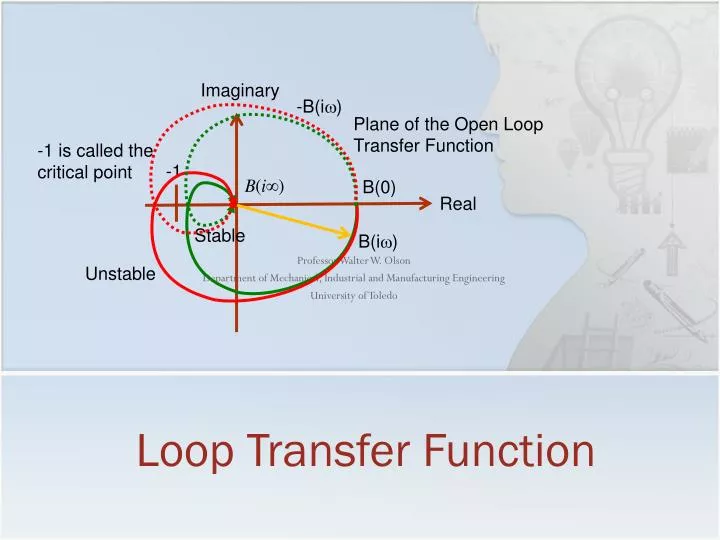
Loop Transfer Function. Imaginary. -B( i w ). Plane of the Open Loop Transfer Function. -1 is called the critical point. -1. B(0). Professor Walter W. Olson Department of Mechanical, Industrial and Manufacturing Engineering University of Toledo. Real. Stable. B( i w ). Unstable.

E N D
Loop Transfer Function Imaginary -B(iw) Plane of the Open Loop Transfer Function -1 is called the critical point -1 B(0) Professor Walter W. Olson Department of Mechanical, Industrial and Manufacturing Engineering University of Toledo Real Stable B(iw) Unstable
Outline of Today’s Lecture • Review • Partial Fraction Expansion • real distinct roots • repeated roots • complex conjugate roots • Open Loop System • Nyquist Plot • Simple Nyquist Theorem • Nyquist Gain Scaling • Conditional Stability • Full Nyquist Theorem
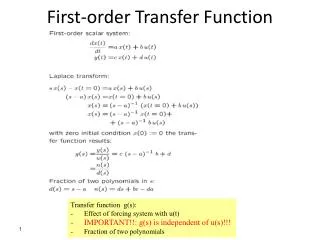
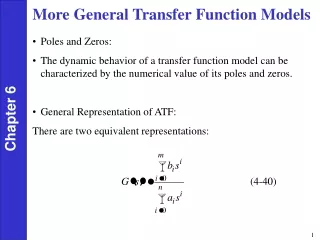
Partial Fraction Expansion • When using Partial Fraction Expansion, our objective is to turn the Transfer Functioninto a sum of fractions where the denominators are the factors of the denominator of the Transfer Function:Then we use the linear property of Laplace Transforms and the relatively easy form to make the Inverse Transform.
Loop Nomenclature Disturbance/Noise Reference Input R(s) Error signal E(s) Output y(s) Controller C(s) Plant G(s) Prefilter F(s) Open Loop Signal B(s) Sensor H(s) + + - - The plant is that which is to be controlled with transfer function G(s) The prefilter and the controller define the control laws of the system. The open loop signal is the signal that results from the actions of the prefilter, the controller, the plant and the sensor and has the transfer function F(s)C(s)G(s)H(s) The closed loop signal is the output of the system and has the transfer function
Closed Loop System Error signal E(s) Output y(s) Input r(s) Controller C(s) Plant P(s) Open Loop Signal B(s) -1 + +
Note: Your book uses L(s) rather than B(s) To avoid confusion with the Laplace transform, I will use B(s) Open Loop System Error signal E(s) Output y(s) Input r(s) Controller C(s) Plant P(s) Open Loop Signal B(s) Sensor -1 + +
Open Loop SystemNyquist Plot Error signal E(s) Output y(s) Input r(s) Controller C(s) Plant P(s) Open Loop Signal B(s) Imaginary B(-iw) Plane of the Open Loop Transfer Function Sensor -1 -1 B(0) Real + + B(iw) -1 is called the critical point
Simple Nyquist Theorem Error signal E(s) Output y(s) Input r(s) Imaginary Controller C(s) Plant P(s) -B(iw) Plane of the Open Loop Transfer Function Open Loop Signal B(s) -1 is called the critical point -1 B(0) Sensor -1 Real Stable B(iw) Unstable + + Simple Nyquist Theorem: For the loop transfer function, B(iw), if B(iw) has no poles in the right hand side, expect for simple poles on the imaginary axis, then the system is stable if there are no encirclements of the critical point -1.
Example • Plot the Nyquist plot for Im -1 Re Stable
Example • Plot the Nyquist plot for Im -1 Re Unstable
Nyquist Gain Scaling • The form of the Nyquist plot is scaled by the system gain • Show with Sisotool
Conditional Stabilty • While most system increase stability by decreasing gain, some can be stabilized by increasing gain • Show with Sisotool
Full Nyquist Theorem • Assume that the transfer function B(iw) with P poles has been plotted as a Nyquist plot. Let N be the number of clockwise encirclements of -1 by B(iw) minus the counterclockwise encirclements of -1 by B(iw)Then the closed loop system has Z=N+P poles in the right half plane. • Show with Sisotool
Summary • Open Loop System • Nyquist Plot • Simple Nyquist Theorem • Nyquist Gain Scaling • Conditional Stability • Full Nyquist Theorem Im -1 Re Unstable Next Class: Stability Margins