Download
1 / 48
780 likes | 2.14k Views
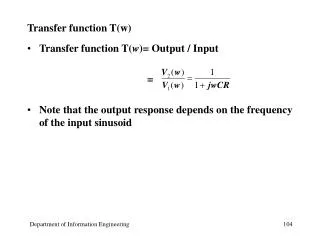
3. Systems and Transfer function. Discrete-time system revision Discrete-time system A/D and D/A converters Sampling frequency and sampling theorem Nyquist frequency Aliasings Z-transform & inverse Z-transform The output of a D/A converter. h(t). x(t). x(kT). Zero-order Hold. Sampler.

E N D
3. Systems and Transfer function Discrete-time system revision • Discrete-time system • A/D and D/A converters • Sampling frequency and sampling theorem • Nyquist frequency • Aliasings • Z-transform & inverse Z-transform • The output of a D/A converter
h(t) x(t) x(kT) Zero-order Hold Sampler 3.1 Zero-order-hold (ZOH) A Zero-order hold in a system
3.1 Zero-order-hold (ZOH) How does a signal change its form in a discrete-time system? The input signal x(t) is sampled at discrete instants and the sampled signal is passed through the zero-order-hold (ZOH). The ZOH circuit smoothes the sampled signal to produce the signal h(t), which is a constant from the last sampled value until the next sample is available. That is
h(t) x(t) x(kT) Zero-order Hold Sampler 3.1 Zero-order-hold (ZOH) Transfer function of Zero-order-hold The figure below shows a combination of a sampler and a zero-order hold.
h(t) t 3.1 Zero-order-hold (ZOH) Assume that the signal x(t) is zero for t<0, then the output h(t)is related to x(t) as follows:
3.1 Zero-order-hold (ZOH) As The Laplace transform of the above equation becomes
3.1 Zero-order-hold (ZOH) As Therefore Finally, we obtain the transfer function of a ZOH as
3.1 Zero-order-hold (ZOH) There are also first-order-hold and high-order-hold although they are not used in control system.
3.1 Zero-order-hold (ZOH) A zero-order-hold creates one sampling interval delay in input signal.
3.1 Zero-order-hold (ZOH) First-order-hold
3.1 Zero-order-hold (ZOH) First-order-hold and high-order-hold does not bring us much advantages except in some special cases. Therefore, in a control system, usually a ZOH is employed. The device to implement a ZOH is a D/A converter. If not told, always suppose there is a ZOH in a digital control system.
GHP(z) GP(s) ZOH 3.2 Plants with ZOH Given a discrete-time system, the transfer function of a combination of a ZOH and the plant can be written as GHP(z) in Z-domain. HP, here, means the ZOH and the Plant.
3.2 Plants with ZOH The continuous time transfer function GHP(s)=G0(s)GP(s) The discrete time transfer function
3.2 Plants with ZOH Example 1: Given a ZOH and a plant Determine their Z-domain transfer function.
3.2 Plants with ZOH Example 2: Given a ZOH and a plant Determine their z-domain transfer function.
3.2 Plants with ZOH Exercise 1: Given a ZOH and a plant Determine their z-domain transfer function. Answer:
Assignment 1 You are required to implement a digital PID controller which will enable a control object with a transfer function of where K=0.2, n=10 rad/s, and =0.3. to track a) a unit step signal, and b) a unit ramp signal. 1) Simulate this control object and find the responses using Matlab or other packages/computer languages.
Assignment 1 2) Choose a suitable sample period for a control loop for G(s) and explain your choice. 3)* Derive the discrete-time system transfer function GHP(z) from G(s). 4) Design a digital PID controller for the discrete-time system, and optimize its parameters with respect to the performance criterion below using steepest descent minimization process . 5) Simulate the resulting closed-loop system and find the responses. Swapping the input signals a) and b), discuss the resulting responses.
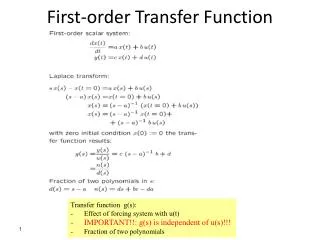
3.3 Represent a system in difference equation For we have Let A=1-e-T and B=e-T, then the transfer function can be rewritten as
3.3 Represent a system in difference equation Simulate the above system 1) Parameters and input: A=1-e-T, B=e-T , x(k)=1 2) initial condition: x(k-1)=0, y(k)=y(k-1)=0, k=0 3) Simulation While k<100 do y(k)=Ax(k-1)+By(k-1); Calculate output x(k-1)=x(k); y(k-1)=y(k); x(k)=1; k=k+1; Update data print k, x(k), y(k); Display step, input & output End
3.3 Represent a system in difference equation Let T=1, we have A=0.6321 and B=0.3679 For a unit step input, the response is y(k)=0.6321x(k-1)+0.3679y(k-1) k= 0 1 2 3 4 5 x(k) 1 1 1 1 1 1 y(k) 0 0.6321 1 1 1 1
Assignment 1 • 1)* Simulate this control object and find the responses using Matlab or other packages/computer languages. • Hints: Method 1
Assignment 1 Hints: Method 2
3.4 System stability We can rewrite the difference equation as If A=1 and =0.9, for an impulse input we have k 0 1 2 3 4 ... x(k) 1 0 0 0 0 ... y(k) 0 1 0.9 0.81 0.729 … It decreases exponentially, a stable system.
3.4 System stability If K=1 and =1.2, we have k 0 1 2 3 4 ... x(k) 1 0 0 0 0 ... y(k) 0 1 1.2 1.44 1.728 2.074… It increases exponentially, an unstable system.
3.4 System stability If K=1 and = -0.8, we have k 0 1 2 3 4 ... x(k) 1 0 0 0 0 ... y(k) 0 1 -0.8 0.64 -0.512 … It decays exponentially, and alternates in sign, a gradual stable system.
3.4 System stability It is clear that the value of determines the system stability. Why is so important? First, let A=1, we have From the transfer function, we can see that z= is a pole of the system. The pole of the system will determine the nature of the response.
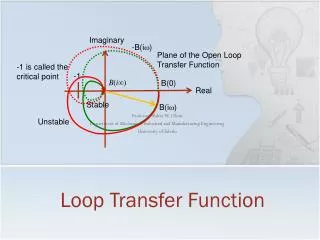
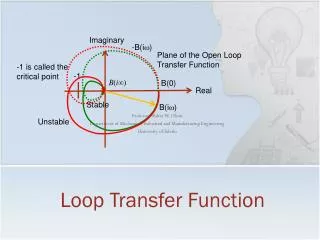
Critical stable area Stable area Unstable area 3.4 System stability For continuous system, we have stable, critical stable and unstable areas in s domain.
3.4 System stability What is the stable area, critical stable area and unstable area for a discrete system in Z domain ? Stable area: unit circle Critical stable: on the unit circle Unstable area: outside of the unit circle
3.4 System stability As For the critical stable area in s domain s=j, As is from 0 to , then the angle will be greater than 2. That is the critical area forms a unit circle in Z domain.
3.4 System stability If we choose a point from the stable area at S domain, eg s=- a + j, we have Let eg s=- + j The stable area in Z domain is within a unit circle around the origin.
3.4 System stability Exercise 2: Prove that the unstable area in Z domain is the area outside the unit circle. Hint: Follow the above procedures.
3.4 System stability Z domain responses 1 0
GHP(z) M(z) C(z) E(z) R(z) GP(s) ZOH Gc(z) Computer system Plant 3.5 Closed-loop transfer function Computer controlled system
3.5 Closed-loop transfer function Let’s find out the closed-loop transfer function
3.5 Closed-loop transfer function C(z): output; E(z): error R(z): input; M(z): controller output GC(z): controller GP(z)/G(z): plant transfer function GHP(z): transfer function of plant + ZOH T(z): closed-loop transfer function GC(z)GHP(z): open-loop transfer function 1+ GC(z)GHP(z)=0: characteristic equation
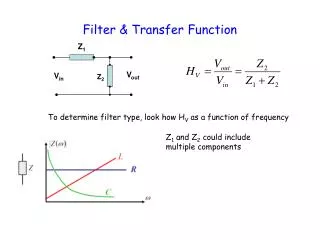
C(s) C(z) + G(s) R(s) - H(s) C(z) + G(s) R(s) - H(s) 3.6 System block diagram
3.6 System block diagram The difference between G(z)H(z) and GH(z) G(z)H(z)=Z[G(s)]Z[H(s)] GH(z)=Z[G(s)H(s)] Usually, G(z)H(z) GH(z) G(z)H(z) means they are connected through a sampler. Whereas GH(z) they are connected directly.
C(z) + G1(s) G2(s) R(s) - H(s) 3.6 System block diagram Example: Find the closed-loop transfer function for the system below. Solution: The open-loop is G1(z)G2H(z). The forward path is G1(z)G2(z).
C(z) + G1(s) G2(s) R(s) - H(s) 3.6 System block diagram
C(s) C(z) + G(s) R(s) - H(s) 3.6 System block diagram *Exercise 3: Find the output for the closed-loop system below.
C(z) + G1(s) G2(s) R(s) - H(s) 3.6 System block diagram *Exercise 4: Find the output for the closed-loop system below.
Reading • Study book • Module 3: Systems and transfer functions (Please try the problems on page 3.46-47) • Textbook • Chapter 3 : Z-plane analysis of discrete-time control system (pages 74-83 & 104-114).
Tutorial Exercise 1: Given a ZOH and a plant Determine their z-domain transfer function.
Tutorial You are required to implement a digital PID controller which will enable a control object with a transfer function of where K=0.2, n=10 rad/s, and =0.3. to track a) a unit step signal, and b) a unit ramp signal. 1) Simulate this control object and find the responses using Matlab or other packages/computer languages.
Tutorial 2) Choose a suitable sample period for a control loop for G(s) and explain your choice. 3) Derive the discrete-time system transfer function GHP(z) from G(s). 4) Design a digital PID controller for the discrete-time system, and optimize its parameters with respect to the performance criterion below using steepest descent minimization process . 5) Simulate the resulting closed-loop system and find the responses. Swapping the input signals a) and b), discuss the resulting responses.
Tutorial • 2) Choose a suitable sample period for a control loop for G(s) and explain your choice. • Sampling theorem • Input signal • Bandwidth of a system • Bold plots • Applying sampling theorem • Sampling frequency