Download
1 / 34
340 likes | 434 Views
Automated Reconstruction of Industrial Sites. Frank van den Heuvel Tahir Rabbani. Overview. Introduction Automation : how does it work? Sample project off-shore platform Accuracy Future Conclusions. The group Photogrammetry & Remote Sensing.

E N D
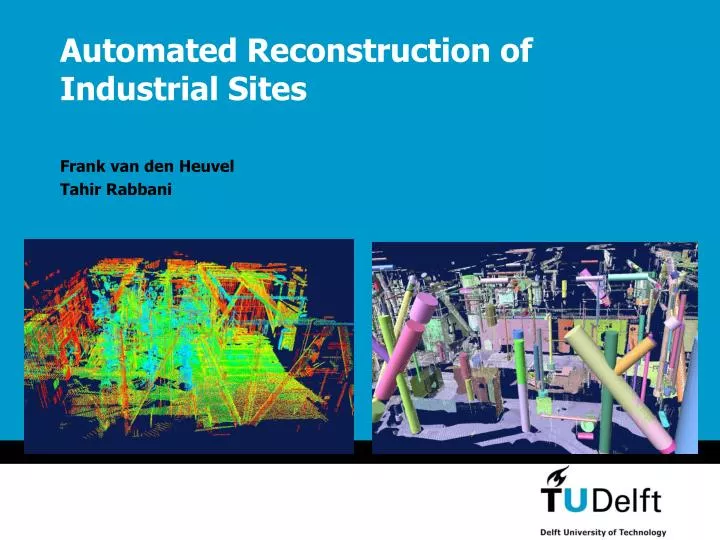
Automated Reconstruction of Industrial Sites Frank van den Heuvel Tahir Rabbani
Overview • Introduction • Automation: how does it work? • Sample project off-shore platform • Accuracy • Future • Conclusions
The groupPhotogrammetry & Remote Sensing • “Development of efficient techniques for the acquisition of 3D information by computer-assisted analysis of image and range data“
The projectServices and Training through Augmented Reality (STAR) • EU fifth framework – IST programme • “Develop new Augmented Reality techniques for training, on-line documentation, maintenance and planning purposes in industrial applications” • AR-example: virtual human in video
The projectServices and Training through Augmented Reality (STAR) • Partners: Siemens, KULeuven, EPFL, UNIGE, Realviz • TUDelft: “Automated 3D reconstruction of industrial installations from laser and image data”
Automated reconstruction procedureOverview (1/3) • Segmentation • Grouping points of surface patches
Automated reconstruction procedureOverview (2/3) • Segmentation • Grouping points of surface patches • Object Detection • Finding planes and cylinders
Automated reconstruction procedureOverview (3/3) • Segmentation • Grouping points of surface patches • Object Detection • Finding planes and cylinders • Fitting • Final parameter estimation
Segmentation – step 1 • Estimation of surface normals using K-nearest neighbours (here K=10 points)
Segmentation – step 2 • Region growing using: • Connectivity (K-nearest neighbours) • Surface smoothness (angle between normals)
Detection – Planes • Plane detection using Hough transform • Find orientation as maximum on Gaussian sphere
Detection – Cylinders • Cylinder detection using Hough transform in 2 steps: • Step 1: Orientation
Detection – Cylinders • Cylinder detection using Hough transform in 2 steps: • Step 1: Orientation
u,v search space at correct Radius Detection – Cylinders • Cylinder detection using Hough transform in 2 steps: • Step 1: Orientation (2 parameters) • Step 2: Position and Radius (3 parameters)
Example: detection of two cylinders • Point cloud segment
Example: detection of two cylinders • Surface normals
Example: detection of two cylinders • Normals on Gaussian sphere
Example: detection of two cylinders • Orientation of first cylinder (next: position)
Example: detection of two cylinders • Remove first cylinder points from segment
Example: detection of two cylinders • Procedure repeated for second cylinder
Example: detection of two cylinders • Result: two detected cylinders
Fitting • Complete CSG model + constraint specification • Final least-squares parameter estimation of CSG model
Fitting • Final least-squares parameter estimation of CSG model • Minimise sum of squared distances • Enforce constraints
Results on platform modelling • Scanned by Delftech in 2003 • Subset of 17.7 million points used by TUD: • Automated detection of 2338 objects • R.M.S. of residuals 4.3 mm
Results on platform modellingStatistics • Points: 17.7 million • Points in segments: 14.2 million (80%) • Points on objects: 9.3 million (53%) • Detected: • Planar patches: 946 • Cylinders: 1392 • Data reduction: • Object parameters 9798 • 500 Mb to 0.1 Mb
Cumulative histogram of residuals 100 90 80 70 60 %age of points 50 40 30 20 10 0 0 2 4 6 8 10 12 14 16 18 20 Residual (mm) Results on platform modelling Accuracy • Residual analysis: • RMS: 4.3 mm • 83% < 5 mm • 96% < 10 mm
Accuracy • Data precision: • Scanner: 6 mm (averaging: 3 mm) • Scanner dependent • Model precision: • Discrepancies models - real world: 0.1-10 mm ? • Limited production accuracy • Deformations • Imperfections in segmentation
Accuracy • Object deformation or segmentation limitations? Fitting after initial segmentation Max.residual 21 mm Fitting after rejecting large residuals Max. residual 9 mm
Future – automation • Reconstruction using laser data: • Segmentation, primitive detection (available) • Correspondence between primitives > registration • Model improvement: • Constraint detection (piping structure) • Recognition of complex elements in a database • Integration with digital imagery
Future – integration with imagery • Instrumentation developments • Scanners with integrated high-resolution digital camera • Accuracy improvement • Imagery complementary: Laser for surfaces, image for edges • Integrated fitting of models to laser and image data
Future – integration with imagery • Instrumentation developments • Scanners with integrated high-resolution camera • Accuracy improvement • Imagery complementary: Laser for surfaces, image for edges • Integrated fitting of models to laser and image data • Flexibility of image acquisition: Completeness • Non-geometric information (What is there?)
Conclusions • Bright future for automation using laser data • More research to be done: • Automated registration • Integration with digital imagery • Using domain knowledge for automated modelling: • Closer connection to the model users needed: • Domain knowledge for automation • Utilisation of research results