Download
1 / 25
250 likes | 388 Views
Fotogrammetrian perusteita I. Photogrammetry when broken into it's roots is "using light to measure and draw“. Kohteesta otetaan kuva tai kuvia, joiden avulla kohde kartoitetaan, ts. siitä tuotetaan 2-, 2.5- tai aito 3D-malli (muoto/koko/sijainti/laadulliset ominaisuudet).

E N D
Fotogrammetrian perusteita I Photogrammetry when broken into it's roots is "using light to measure and draw“. Kohteesta otetaan kuva tai kuvia, joiden avulla kohde kartoitetaan, ts. siitä tuotetaan 2-, 2.5- tai aito 3D-malli (muoto/koko/sijainti/laadulliset ominaisuudet). Lähifotogrammetria (Close Range Photogrammetry) Ilmavalokuvaus (Aerial Photogrammetry) ja Satelliittifotogrammetria.“Stereofotogrammetria”. (stereo- vs. multiscopic)Passiivinen vs. aktiivinen kuvaus; lidar fotogrammetriaa? MINV12 Pe 3.3. 08:15-10:00
Perusteita Kohde paikallaan – kamera liikkuu tai on useita kameroita Kohde liikkuu – kamera(t) paikallaan Kuvamittaamisen edellytys: Tunnetaan kuvasäteen kulku sensorin pinnalta kohteeseen ja takaisin. Matkalla suoraviivaista kulkua vääristävät väliaine ja linssisysteemi suotimineen. Yksinkertaisin malli: “Neulanreikäkameramalli” kuvasäde kulkee kohteesta linssille suoraan ja jatkaa matkaan projektiokeskuksen kautta edelleen samansuuntaisena kunnes leikkaa filmin, joka on äärettömän ohut taso. MINV12 Pe 3.3. 08:15-10:00
Perusteita - sensorimalli ADS40 frame sensor vs. linear scanner Leica ADS40- yksi optiikka- 3 (712000) pikselin riviä/viivaa kolme samanaikaista katselusuuntaa. - keskusprojektio CCD-rivin suunnassa ja yhdensuuntaisprojektio lentolinjan suunnassa Jokaisen CCD-rivin orientaatio on erilainen ja ajan (t) funktio kompleksi, mutta hallittavissa oleva malli (vrt. satelliittikuvien sensorimallit) MINV12 Pe 3.3. 08:15-10:00
Perusteita – neulanreikäkameramalli Avaruussuora: p(t) = (X,Y,Z) + t (i,j,k) tai Jos X, Y tai Z tunnetaan; kaksi muuta voidaan ratkaista, jos lisäksi kertoimet (a…h) tunnetaan. Yhteensä on 6 tuntematonta per kamera. Avaruussuora (kuvasäde) kulkee kameran polttopisteen kautta, ja sitä leikkaa kuvataso (filmi, CCD-kenno), jonka pinnan normaali (kameran optinen akseli) leikkaa polttopisteen etäisyydellä, jota kutsutaan polttoväliksi tai kameravakioksi. MINV12 Pe 3.3. 08:15-10:00
Perusteita – ulkoinen orientointi Kamera on kiertynyt kolmiulotteisesti avaruudessa. Kameran xyz-akseliston ja 3D koordinaatiston XYZ-akseliston välille pitää rakentaa kuvaus, jolla kuvasäde viedään polttopisteestä kameran sisään filmille ja/tai -1. Matemaattisesti kuvaus on ortogonaali 3x3 kiertomatriiri R, R-1 = RT Sen elementit rij vastaavat koordinaattiakselien suuntakosineja [-1,1]rxX,rxY,rxZ,…rzZ. Filmillä/kuvatasolla jokaisella pisteellä on xyz-kamerakoordinaatit (x,y,c) eli kuvasäde pitää ‘pysäyttää’ tasoon, joka on etäisyyden c = polttoväli päässä polttopisteestä, joka sijaitsee kuvatason normaalilla. MINV12 Pe 3.3. 08:15-10:00
Kuva (x,y,c) → Kohde(X,Y,Z) Yksikuvamittaus: (x,y)-havainto kuvalta, Z kiinnitetään => t ratkeaa => X,Y ratkeaa.
Kuva (x,y,c) → Kohde(X,Y,Z), Esimerkki (DEMO 1) Yksikuvamittaus: (x,y,c)-havainto kuvalta,Z-kiinnitetään => t ratkeaa => X,Y ratkeaa. Esim. Kuva FM02204_1230 Suuntakosinitr11:=-0.26788;r12:=-0.96343;r13:=0.00667;r21:= 0.96344;r22:=-0.26783;r23:=0.00721;r31:=-0.00516;r32:= 0.00836;r33:=0.99995;Polttopisteen sijainti (KKJ):X0:=2515731.81;Y0:=6860644.14;Z0:=1132.57;Kuvahavainnot (c=kameravakio):x:=-0.100370;y:=0.086453;c=0.153277;Oletetaan kohteelle Z = 165 m.165-Z0-t*(r31*x+r32*y+r33*(-c))=0Ratkaisu: t = 6364.391249, sijoitetaan tX-X0-t*(r11*x+r12*y+r13*(-c))=0Y-Y0-t*(r21*x+r22*y+r23*(-c))=0Ratkaisu: X = 2515366.32,Y = 6859874.30, Z =165.0vrt. 2515366.58, 6859874.90, 165.8 MINV12 Pe 3.3. 08:15-10:00
Kohde(X,Y,Z) →Kuva (x,y,c) , Esimerkki Kuva FM02204_1230; X0,Y0,Z0 ja suuntakosinit samat kuin edellä Suuntakosinit: > r11:=-0.26788;r12:=-0.96343;r13:=0.00667; r21:= 0.96344;r22:=-0.26783;r23:=0.00721; r31:=-0.00516;r32:= 0.00836;r33:=0.99995;Projektiokeskuksen sijainti (polttopiste) > X0:=2515731.81;Y0:=6860644.14;Z0:=1132.57; 3D-pisteen sijainti ja kameravakio: X:=2515300;Y:=6859900; Z:=165; c:=0.153277; Ratkaisu (kollineaarisuushtälöt):> x = -c*(r11*(X-X0)+r21*(Y-Y0)+r31*(Z-Z0))/ (r13*(X-X0)+r23*(Y-Y0)+r33*(Z-Z0)); -0.093663 m> y = -c*(r12*(X-X0)+r22*(Y-Y0)+r32*(Z-Z0))/ (r13*(X-X0)+r23*(Y-Y0)+r33*(Z-Z0)); 0.095386 m Ortoilmakuvan valmistus: 1. Annetaan XY-alue, johonortokuva halutaan tulostaa pinnan Qsuhteen 2. Tehdään pistehila (XY),joka määrää pikselikoon3. On olemassa korkeusmalli pinnalle Q, ZQ = f(X,Y).4. Kuva tehdään XY-piste kerral-laan, haetaan pisteelle Z mallilta, (X,Y,Z), haetaan ko. pisteen paikka ilmakuvalta →(x,y,c) otetaan sieltä pikseli, joka siirretään (interpoloidaan) ortokuvalle.DEMO 2 MINV12 Pe 3.3. 08:15-10:00
Mistä orientointitunnukset? • Edellä olevissa yhtälöissä tarvittiin: • Kameravakio, c eli kuvakoordinaatin z-arvo • Kuvakoordinaatit “filmitasolla” eli x ja y. • Polttopisteen sijainti (X0,Y0,Z0) • Suuntakosinit eli 3x3 R-matriisi (3 avaruuskierron funktiona, esim.) x:=-0.100370y:=0.086453c=0.153277
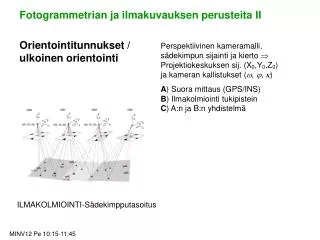
Orientointitunnukset? Yleiskatsaus Filmikamera skannaus + reunamerkkien mittaus reunamerkkimuunnoksen laskenta (x,y) = f(row,col). Kameravakio c kalibrointitiedoista. Jos digikamera pääpisteen osoittaminen (row, col), pikselikoordinaatiston skaala rivi- ja sarakesuunnissa + mahd. affiinisuus sekä kameravakio c kalibrointitiedoista.Jos linssivirheitä, ne on kompensoitava. Projektiokeskuksen sij. (X0,Y0,Z0) ja kameran kallistukset (, , ) joko A) Suora mittaus (GPS/INS)B) Ilmakolmiointi tukipisteinC) A:n ja B:n yhdistelmä ILMAKOLMIOINTI-Sädekimpputasoitus MINV12 Pe 3.3. 08:15-10:00
Sitten oikeisiin 3D mittauksiin valolla.. www.riegl.co.at/ MINV12 Pe 3.3. 08:15-10:00
... oletetaan orientointi ratkaistuksi; Kaksi kuvaa → 3D kohde kuva - kohde kuvasäteet: Kamera1 Kamera2 Tuntemattomia: Pisteen P (X,Y,Z) eli kohdepiste eli kuvasäteiden leikkauspiste. Ts. kuvasäteiden pituudet kameroille 1 ja 2: t1 ja t2.Tunnettuja: Projektiokeskusten sijainnit X0,Y0, Z0, kallistukset rij sekä kuvahavainnot (x,y,c) molemmilta kuvilta. Koska orientoinnit saati havainnot eivät ole täydellisiä eivät kuvasäteet leikkaa tarkasti (6 yhtälöä 5 tuntematonta) - voidaan unohtaa yksi yhtälö (kerrallaan) ja ratkaista tuntemattomat viidestä yhtälöstätai käyttää ylimääritystä ja optimointia/ tasoituslaskua. MINV12 Pe 3.3. 08:15-10:00
2 kuva → XYZ; ‘Virheettömät havainnot’ Ratkaisutapa 1: Minimoidaan (t1,t2)- avaruudessa 'kiinteiden' suorien välistä etäisyyttä. Valitaan ratkaisuksi piste (keskiarvo), joka minimoi suorien välisen 3D-etäisyyden (Optimointitehtävä n, ratkaisu esim. gradienttimenet.).
3 kuva → XYZ; ‘Virheettömät havainnot’ Kolme kuvaa (1230, 1231, 1232)> ratk:=extrema(dist3,{},{t1,t2,t3},'s'); ratk := {.224} (miniminormi 22.4 cm) > s; {t1=6359.099310,t2=6376.119592,t3=6412.668636} Ratkaisu keskiarvona: 2515366.596, 6859874.913,165.835
3 kuva → XYZ; ‘Virheelliset havainnot Ratkaisutapa: PNS-virheyhtälötasoitus. 'ei-kiinteät kuvasäteet'Arvataan pisteen (X,Y,Z) paikka. Korjataan sitä iteroiden korjauksilla [X,Y,Z]. Ne ratkaistaan tuntemattomien suhteen (X,Y,Z) linearisoiduista kollineaarisuus-yhtälöistä (muodostetaan PNS-normaaliyhtälöt). minimoiden kuvatason havaintovirheiden neliösummaa. MINV12 Pe 3.3. 08:15-10:00
3 kuva → XYZ; ‘Virheelliset havainnot Jokainen kuvahavainto (x,y) tuottaa yhtälöparin, joka linearisoidaan tuntemattomien kohdekoordinaattien suhteen. Osittaisderivaattojen arvot (lähtölikiarvoilla X0, Y0, Z0) sijoitetaan A-rakennematriisiin, jossa N2 riviä, 3 saraketta. (N=kuvien lkm) Lähtölikiarvoilla saatujen koordinaattien ja havaittujen koordinaattien erotuksista kootaan virhevektori (y) x = (ATA)-1 ATy PNS (OLS) –ratkaisuna saadaan parannukset, x MINV12 Pe 3.3. 08:15-10:00
3 kuva → XYZ; ‘Virheelliset havainnot Esim. Kuvat 1230, 1231, 1232 Kolme kuvaa Kuusi havaintoyhtälöä A(6x3), y(6x1) Alkuarvaus: 2 515 000, 6 860 000, 200Linearisointi (A ja y)Korjaus: x=(ATA)-1 ATy, [353.940, -121.008, -33.526]Korjattu: 2515353.94, 6859878.99, 166.47Linearisointi (uusi A ja y)Korjaus: x=(ATA)-1 ATy, [12.629, -4.089, -0.680]Korjattu: 2515366.57, 6859874.90, 165.79 Linearisointi (uusi A ja y)Korjaus: x=(ATA)-1 ATy, [0.008, -0.002, 0.000]Korjattu: 2515366.58, 6859874.90, 165.79vrt. (t1,t2,t3): 2515366.60, 6859874.91, 165.84 DEMO 3 eteenpainleikkaus.xls MINV12 Pe 3.3. 08:15-10:00
N kuva → XYZ (Tarkkuus) Painoyksikön (havaintojen) keskineliövirhe, “sigma-null”, [m] Normaaliyhtälöiden käänteismatriisin diagonaalialkioiden ja keskineliövirheen avulla keskivirheet tuntemattomille X, Y ja Z –koordinaateille (vrt. GPS:n #DOP-arvot) “Naivi mittari”, koska kun 0→ 0 → xk → 0 Kuvien orientointiparametrein epävarmuus jää kokonaan huomiotta (virheiden kasautuminen) MINV12 Pe 3.3. 08:15-10:00
Perspektiivisen kuvautumisen ominaisuuksia 1) Pistemäinen projektiokeskus2) Kuvautuminen 3D sädekimpun avulla3) Sädekimppu leikkaa kuvatason kuvapisteissä Geometrinen malli, joka kuvaa tulosta, ei tapahtumaaKamerassa kamera(kuva)koordinaatisto (x,y,z), origona projektiokeskus. z-akseli kuvataso kuvapisteiden z = c. Pääpiste, tulee yhtyä kuvan keskipisteeseen.Kuvanadiri, projektiokeskuksen luotisuoran kantapiste kuvallaSädekimppu, voidaan muodostaa uudelleen, jos kuvapisteet ja projektiokeskus tunnetaan.Sisäinen orientointi: projektiokeskuksen sijainti kuvatasoon nähden, kolmella parametrilla (c, x0,y0)Ulkoinen orientointi: Sädekimpun sijainnnin ja suunnan määrittäminen käyttäen kuutta riippumatonta suuretta, esim. (X0,Y0,Z0, , , ) MINV12 Pe 3.3. 08:15-10:00
Perspektiivisen kuvautumisen ominaisuuksia • Suorat kuvautuvat suorina- Neliöt kuvautuvat nelikulmioiksi- Neliön kuvaus suorakulmioksi (affiini) ei mahdollinen - Mittakaava vääristyy riippuen paikasta ja suunnasta (Pystykuville keskimääräinen kuvamittakaava)- Suunnat ja kulmat vääristyvät- Luotisuorat suuntautuvat nariripisteeseen (pakopiste), säteissiirtymä (kuva alla, Z = 17 m = Hyytiälän lipputanko, varjo 16.6 m) MINV12 Pe 3.3. 08:15-10:00
Perusteita SENSORIT • Mittakamerat - ilmakuvakamerat • Toteuttavat neulanreikäkameramallin erittäin tarkasti- Stabilointi ja liikkeenkompensointi- Filmikamerassa vakuumi → kuva piirtyy tasolle- Kalibrointi, 2-4 v välein, polttoväli/kameravakio, reunamerkkien sijainti, pääpisteen sijainti, radiaaliset ja tangentiaaliset piirtovirheet, kromaattinen aberraatio- polttoväli voi muuttua ilmanpaineen ja lämpötilan vaikutuksesta (saattaa aih. ongelmia käytettäessä DSO:ta) - Kuvakoko tavallisesti 23 x 23 cm, polttoväli 15, 21 tai 30 cm max FOV ~ 45o, 25o ja 16o Laajakulmakamera, välikulmakamerat, pitkän polttovälin kamerat
Perusteita SENSORIT - Filmi rullalla, ~ 0.12 mm paksua, itse emulsio 0.02 mm, Lämpölaajeneminen ~0.002% per Celsius-aste Kutistuu säilytettäessä, suurin kutistuminen heti kehityksen jälkeen ~ 0.05 – 0.1 %.- Filmillä maksimaalinen erotuskyky, MTF, 50-400 viivaparia/mm, riippuen filmityypistä ja mittauksessa käytetystä kontrastista- VÄI-filmi: UV ja sininen (suodatetaan), vihreä → sininen, punainen → vihreä, lähi-infra → punainen. MINV12 Pe 3.3. 08:15-10:00
Perusteita... kuvanmuodostuksesta Ilmakuvan digitointi - Filmi skannataan fotogrammetrisella skannerilla.- Digikameroiden CCD-anturit 11k x 7 k Fotogrammetrinen skanneri, Min ~ 7 m 32k32k 3-4 Gt, kun kvantisointi tehdään N 6-12 bitillä Skannauksen jälkeen tietokoneoheislaitteineen fotogrammetrisiintehtäviin (orientaatiot, mittaus,kuvalaboratorio). Digikameraa käytettäessä selvitään ilman kehitystä ja skannausta ja saavutetaan yl. parempi radiometrinen laatu. http://www.wehrliassoc.com/
Perusteita... ilmakuvaus Pituuspeitto-% = kuvakannan suhde kuvasivun pituuteen, stereokuvauksissa 50-70 %. Kuvassa vas. ~ 70 %. Kuvakanta = kahden peräkkäisen kuvan projektiokeskusten välinen suora ja sen pituus.Sivupeitto-% = vierekkäisten kuvalinjojen kuvien peitto-%, yleensä 20-30 %, kuvassa 60 %.GPS-navigointi kuvanottopisteet osuvat määriteltyihin tarkkuudella joka on parempi kuin 50 m.Mittakaava = on vakio kohteille, jotka ovat tasolla joka on kohtisuorassa kamera optisen akselin kanssa, vakioetäisyydellä kamerasta. Ilmakuville määritellään nimellinen MK maaston keskikorkeuden avulla olettaen täydellinen pystykuvaus. ipi.uni.hannover MINV12 Pe 3.3. 08:15-10:00
Perusteita - ilmakuvauksen suunnittelu ja tilaus Kuvaussuunnitelma / tarjouspyyntöAlue, kamera (filmi ja suotimet), mittakaava, peitot / kuvanottopaikat (X,Y,Z) ja navigointitarkkuus.Kameran stabilointi, suora georeferointi, kuvaoikeudet, digitointi, siirtomedia, kuvatuotteet (raaka / ortokuvat / suurennokset / pinnakkaiset), laatukriteerit (kansallisia, eri järjestöjen) Tukipisteaineisto + signalointi (mittaus, arkistot, sign. rakentaminen) 33 asteen aurinkokulma ja pilvetön sää (ei utua) 21.6. 2½ kk (max 7 tuntia / vrk) "Fenologia" topografiset kuvaukset (kevät) vs. metsäkuvaukset (kesä).