Download
1 / 20
200 likes | 212 Views
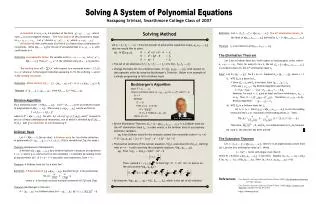
Learn how to solve a system of equations and understand the conditions for a solution using the rank of the system and witness vectors. Explore the concepts of linear programming and its connection to solving systems of equations.

E N D
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 3
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 3 1 -2 1 0 = 2 no solution
Solving a system of equations a11 x1 + a12 x2 + a13 x3 = b1 a21 x1 + a22 x2 + a23 x3 = b2 a31 x1 + a32 x2 + a33 x3 = b3 A x = b has a solution iff rank (A) = rank (A b)
Solving a system of equations A x = b has a solution iff rank (A) = rank (A b) rank (A) < rank (A b) then y such that yT A = 0 and yT b 0
Solving a system of equations A x = b has a solution iff rank (A) = rank (A b) rank (A) < rank (A b) then y such that yT A = 0 and yT b 0 y is a witness that A x = b does not have a solution
Solving a system of equations yT A = 0 and yT b 0 y is a witness that A x = b does not have a solution A x = b yT (A x) = yT b (yT A) x = yT b 0 = yT b a contradiction
Solving a system of equations Theorem: If Ax=b doesn’t have solution then y such that yT A =0 and yT b 0
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1
Solving a system of equations 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1 x1 = -3 x2 = 2 x3 = 0
Back to linear programming 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1 x1 0 x2 0 x3 0 I.e., we want a non-negative solution.
Back to linear programming 1 x1 + 3 x2 + 6 x3 = 3 2 x1 + 4 x2 + 7 x3 = 2 3 x1 + 5 x2 + 8 x3 = 1 0 -1 1 x1 + x2 + x3 = -1 x1 0 x2 0 x3 0 I.e., we want a non-negative solution.
Back to linear programming yTA 0 and yTb < 0 y is a witness that A x = b, x 0 does not have a solution A x = b yT(A x) = yTb (yTA) x = yTb non-negative = negative, a contradiction
Back to linear programming Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution then y such that yTA 0 and yTb < 0 Theorem: If Ax=b doesn’t have solution then y such that yTA =0 and yTb 0
Idea of the proof Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution then y such that yTA 0 and yTb < 0 Ax, x 0 b
S=convex, b not in S c such that ( x S)cT x > cT b Idea of the proof Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution then y such that yTA 0 and yTb < 0 cTx Ax, x 0 b separating hyperplane
Theorem (Farkas): If Ax=b, x 0 doesn’t have a solution y such that yTA 0 and yTb < 0 Duality max cT x Ax=b x 0 min yT b yT A cT
“” “=” and non-negativity a1 x1 + ... + an xn b a1 x1 + ... + an xn= b + y, y 0 a1 x1 + ... + an xn – y = b, y 0
“=” “” a1 x1 + ... + an xn= b a1 x1 + ... + an xn b a1 x1 + ... + an xnb a1 x1 + ... + an xn b -a1 x1 - ... - an xn -b
Duality max c1Tx1+c2Tx2 + c3Tx3 + c4Tx4 A1 x1=b1 A2 x2 b2 A3 x3 = b3 A4 x4 b4 x1 0,x2 0 min y1Tb1+y2Tb2+y3Tb3 + y4Tb4 y1T A1 c1T y2T A2 c2T y3T A3 = c3T y4T A4 = c4T y2 0, y4 0
Solving linear programs Simplex (Danzig, 40’s) Ellipsoid (Khachiyan, 80’s) Interior point (Karmakar, 80’s)