Download
1 / 1
10 likes | 110 Views
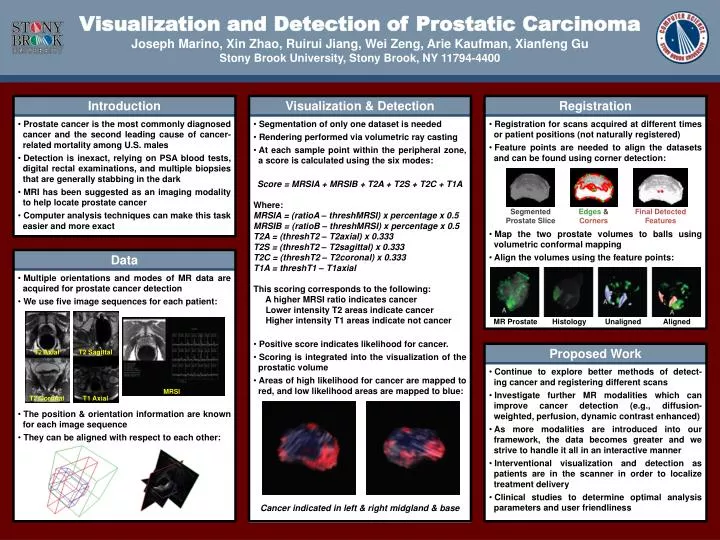
Visualization and Detection of Prostatic Carcinoma Joseph Marino, Xin Zhao, Ruirui Jiang, Wei Zeng, Arie Kaufman, Xianfeng Gu Stony Brook University, Stony Brook, NY 11794-4400. Introduction. Visualization & Detection. Registration.

E N D
Visualization and Detection of Prostatic Carcinoma Joseph Marino, Xin Zhao, Ruirui Jiang, Wei Zeng, Arie Kaufman, Xianfeng Gu Stony Brook University, Stony Brook, NY 11794-4400 Introduction Visualization & Detection Registration • Prostate cancer is the most commonly diagnosed cancer and the second leading cause of cancer- related mortality among U.S. males • Detection is inexact, relying on PSA blood tests, digital rectal examinations, and multiple biopsies that are generally stabbing in the dark • MRI has been suggested as an imaging modality to help locate prostate cancer • Computer analysis techniques can make this task easier and more exact • Segmentation of only one dataset is needed • Rendering performed via volumetric ray casting • At each sample point within the peripheral zone, a score is calculated using the six modes: • Score = MRSIA + MRSIB + T2A + T2S + T2C + T1A • Where: • MRSIA = (ratioA – threshMRSI) x percentage x 0.5 • MRSIB = (ratioB – threshMRSI) x percentage x 0.5 • T2A = (threshT2 – T2axial) x 0.333 • T2S = (threshT2 – T2sagittal) x 0.333 • T2C = (threshT2 – T2coronal) x 0.333 • T1A = threshT1 – T1axial • This scoring corresponds to the following: • A higher MRSI ratio indicates cancer • Lower intensity T2 areas indicate cancer • Higher intensity T1 areas indicate not cancer • Positive score indicates likelihood for cancer. • Scoring is integrated into the visualization of the prostatic volume • Areas of high likelihood for cancer are mapped to red, and low likelihood areas are mapped to blue: • Cancer indicated in left & right midgland & base • Registration for scans acquired at different times or patient positions (not naturally registered) • Feature points are needed to align the datasets and can be found using corner detection: • Map the two prostate volumes to balls using volumetric conformal mapping • Align the volumes using the feature points: Segmented Prostate Slice Edges & Corners Final Detected Features Data • Multiple orientations and modes of MR data are acquired for prostate cancer detection • We use five image sequences for each patient: • The position & orientation information are known for each image sequence • They can be aligned with respect to each other: MR Prostate Histology Unaligned Aligned Proposed Work T2 Axial T2 Sagittal • Continue to explore better methods of detect- ing cancer and registering different scans • Investigate further MR modalities which can improve cancer detection (e.g., diffusion- weighted, perfusion, dynamic contrast enhanced) • As more modalities are introduced into our framework, the data becomes greater and we strive to handle it all in an interactive manner • Interventional visualization and detection as patients are in the scanner in order to localize treatment delivery • Clinical studies to determine optimal analysis parameters and user friendliness MRSI T2 Coronal T1 Axial