Download
1 / 16
160 likes | 242 Views
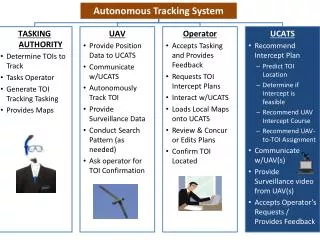
Autonomous Tracking Unit (New Name -- Same Great Project). John Berglund Randy Cuaycong Wes Day Andrew Fikes Kamran Shah. Spring 1999. CPSC 483 Midterm Evaluation. Project Status. Objective: Develop an autonomous camera that can identify and track an object in motion.

E N D
Autonomous Tracking Unit(New Name -- Same Great Project) John Berglund Randy Cuaycong Wes Day Andrew Fikes Kamran Shah Spring 1999 CPSC 483 Midterm Evaluation
Project Status Objective: • Develop an autonomous camera that can identify and track an object in motion Project Goals (Revised): • Develop a 2-dimensional servo control system • Develop a camera platform • Implement an FPGA to camera interface • Develop a memory and camera control system • Develop a motion tracking algorithm • Implement the algorithm in hardware • Integrate components
SRAM Camera Memory & Camera Control Camera Interface Motion Detection Hardware Servos Servo Control System Diagram (Revised)
20ms 10000 increments Servo Control Design #1 • Divides the pulse into 10000 increments. • Minimum pulse = 625 increments • Maximum pulse = 875 increments • Problem • Large CLB requirement due to 14-bit counter.
Servo Control Design #2 • Test the MSB for minimum pulse length. • 6-bit input angle and a 7-bit internal counter • Problems • Wrong range of pulse duty cycle. Not 1.25-1.75ms • Did not provide small enough increments.
Servo Control Design #3 • Use 8-bit counter twice • Increment for minimum pulse length. • Reset and increment angle. • Problem • CLB count increased as in Design #1 Final Design • Backed up to Design #2. • 8-bit input angle with 9-bit internal counter. • Test for MSB. • Minimum pulse length => 1|0000|0000 - minimum number of pulses
Camera Servo Camera Platform
Command (8) Memory and Camera Control Instruction (8) Camera Interface Module QuickCam Parameter (8) Reset Start PCAck Hold Nibble (4) CamRdy Data (8) Send Rdy Valid Camera Interface I • Supports all QuickCam nibble-mode commands • Reduced Xilinx footprint from previous implementations • Fully tested and operational • Speed is limited by handshaking protocol • Difficult for outside logic to control and initialize camera
Command Command (8) Memory and Camera Control Camera Interface Module QuickCam Start Reset Hold PCAck Nibble (4) CamRdy Data (8) Send Valid Camera Interface II • Removes handshakingprotocol • Reduces complexity of controlling logic • Initialization and video frame size are configurable • Easily integrated into other team’s projects
Algorithm Test & Development • Goal was to develop and test several algorithms • Use software to help us visually compare solutions • Tests will compare performance in different scenarios





![[Program/Agency Name]](https://cdn3.slideserve.com/6646949/program-agency-name-dt.jpg)
