Download

1 / 2
20 likes | 112 Views
ROBOT PARA DESPLAZAMIENTOS DIRIGIDOS. UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS INGENIERIA EN CONTROL ELECTRONICO JHON FABER GUTIERREZ F WILFREDO ENRIQUEZ L. ROBOT PARA DESPLAZAMIENTOS DIRIGIDOS. PLANTEAMIENTO

E N D
ROBOT PARA DESPLAZAMIENTOSDIRIGIDOS UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS INGENIERIA EN CONTROL ELECTRONICO JHON FABER GUTIERREZ F WILFREDO ENRIQUEZ L
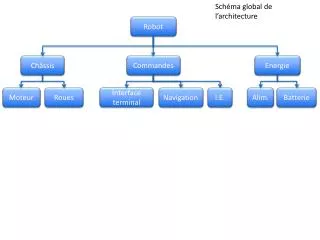
ROBOT PARA DESPLAZAMIENTOS DIRIGIDOS PLANTEAMIENTO Armar un prototipo de robot móvil dotado con un sistema de comunicación bidireccional que le permita compartir información con una terminal remota la cual va a ejercer labores de monitoreo y control del robot. Esta terminal va a estar representada por un PC que tendrá instalado un programa que delimitara el espacio de trabajo del robot, y podrá enviar comandos y recibir datos del mismo. Nuestro enfoque esta en desarrollar un modelamiento que le permita al robot adaptarse a distintos espacios de trabajo, establecer rutas de movimiento, evasión de obstáculos y delimitaciones del área. Además, este modelamiento debe ser sintetizado en un dispositivo electrónico (DSPIC, FPGA, PSOC, u otro), para ser instalado en la tarjeta de control del robot.