Download
1 / 10
280 likes | 801 Views
PID 控制器. 指導老師:吳敏光 班級:自控四甲 學號: 49412023 姓名:黃永成. PID 控制器之原理. PID 控制器是由比例單元 P 、積分單元 I 和微分單元 D 組成。通過 Kp , Ki 和 Kd 三 個參數的設定。 PID 控制器是一個在工業控制應用中常 見的反饋迴路部件。. 反饋迴路基礎. PID 迴路是要自動實現一個有量具和控制旋鈕的操作人員的工作。 在一個控制迴路包括三個部分: 1. 系統的感測器得到的測量結果。 2. 控制器作出決定。 3. 通過一個輸出設備來作出反應。

E N D
PID控制器 指導老師:吳敏光 班級:自控四甲 學號:49412023 姓名:黃永成
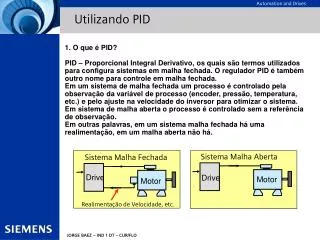
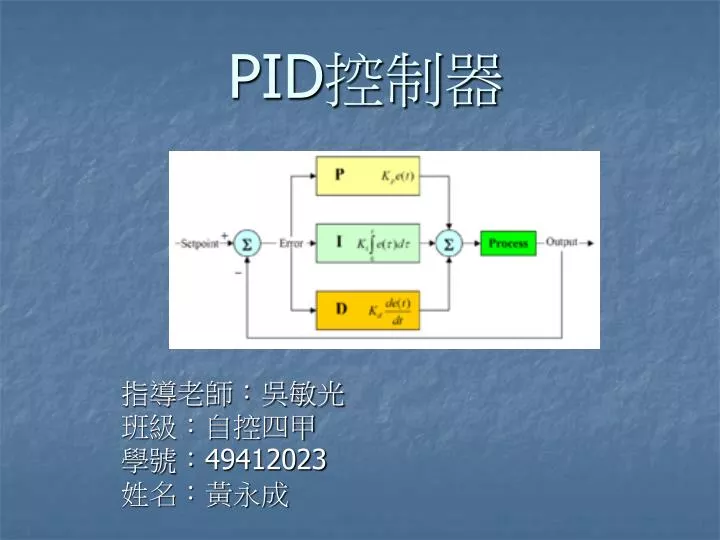
PID控制器之原理 • PID控制器是由比例單元P、積分單元I 和微分單元D組成。通過Kp, Ki和Kd三 個參數的設定。 • PID控制器是一個在工業控制應用中常 見的反饋迴路部件。
反饋迴路基礎 • PID迴路是要自動實現一個有量具和控制旋鈕的操作人員的工作。 • 在一個控制迴路包括三個部分: • 1.系統的感測器得到的測量結果。 • 2.控制器作出決定。 • 3.通過一個輸出設備來作出反應。 • 控制器從感測器得到測量結果,然後用需求結果減去測量結果來得到誤 差。然後用誤差來計算出一個對系統的糾正值來作為輸入結果,這樣系統 就可以從它的輸出結果中消除誤差。 • 在一個PID迴路中,這個糾正值有三種演算法,消除目前的誤差,平均過 去的誤差,和透過誤差的改變來預測將來的誤差。 • PID控制器可以用來控制任何可以被測量的並且可以被控制變數。如控制 溫度,壓強,流量,化學成分,速度等等。
PID控制器之理論 • PID是以它的三種糾正演算法而命名的。這三種演算法是: • 比例(P)→來控制當前。 • 積分(I)→來控制過去。 • 導數(D)→來控制將來。 • 一個PID控制器可以被稱作一個在頻域系統的過濾器。這一點在計算它是否會最終達到穩定結果時很有用。如果數值挑選不當,控制系統的輸入值會反覆振蕩,這導致系統可能永遠無法達到預設值。
PID控制器之應用 下圖為PID控制的基本型式。目標值減掉檢測量的值,就可視為控制量的期望值與現實值的差異,這個差異就稱為偏差,根據偏差來決定操作量。 PID控制系統之基本型式
PID控制器之應用 PID控制系統閉迴路控制方塊圖
PID控制器之應用 • 船舶於海上航行,其航向最主要受到湧浪之平擺的 影響及螺槳推進器之橫向推力或因橫向推力與天氣 情況相結合之力,使船舶偏離其航向。 • 船舶之艏向藉著羅經的指示,由所指示的船艏向, 探測出船舶所偏離的航向,經由自動導航系統輸出 舵令信號加於舵機作修正,使船舶回返至其原訂航 向航行。
PID控制器之應用 舵令信號可區別為三種舵控制操作。比例控制,指艏向誤差信號與舵令信號成正比;微分控制,即壓舵,當改變至新航向,由其操作可減少超越量;積分控制是自動地修正其船舶航向,使船舶回至其特定航向。舵運動之舵角,產生一相反信號(相當於抵消艏向誤差信號),回饋至駕駛台,完成閉迴路,並停止操舵作用。 自動導航控制系統閉迴路方塊圖
總結 • 在閉迴路控制中,為了要使系統達到穩定,常對系統進行 PID控制,利用這Kp、Ki、Kd三種參數的調整,使得在單 一輸入及單一輸出的控制下可以達到非常好的穩定性。因 此控制系統的設計重點是如何決定Kp、Ki、Kd這三個參數 值,我們將之稱為PID控制器的調整,就是替控制器參數 尋找一個最佳設定值,讓其閉迴路的系統性能指標極小 化。 • PID控制器目前廣泛地使用於工業程序控制中,其參數值 • 通常是固定的,因此調整Kp、Ki、Kd參數到適當的值是控 • 制工程人員在工業程序控制中最實際的課題之一。