Download
1 / 20
210 likes | 532 Views
Translation – movement along X, Y, and Z axis (three degrees of freedom). Rotation – rotate about X, Y, and Z axis (three degrees of freedom). 3 DOF. Z. Point. Y. Y. 2 DOF. X. X. 6 DOF. Z. 3 DOF. Rigid Body. Y. Y. X. X. One Link (3DOF). Two Links (6DOF).

E N D
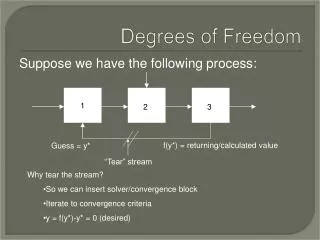
Translation – movement along X, Y, and Z axis (three degrees of freedom) Rotation – rotate about X, Y, and Z axis (three degrees of freedom)
3 DOF Z Point Y Y 2 DOF X X
6 DOF Z 3 DOF Rigid Body Y Y X X
One Link (3DOF) Two Links (6DOF) Two Links + One Joint (4DOF) One Link (3DOF)
The Revolute joint (pin or hinge joint) - one degree of freedom(Reduces 2 degrees of freedom in ) It allows pure rotation between the two links that it connects (R joints)
The Sliding joint (prism or piston joint) - one degree of freedom(Reduces 2 degrees of freedom) It allows linear sliding between the two links that it connects (P joint)
DOF ≤ 0 structure mechanism DOF > 0 DOF = 3(L – 1) – 2J1 – J2 DOF = degree of freedom (Planar) L = number of links, including ground link J1 = number of 1 DOF joints J2 = number of 2 DOF joints
DOF = 3(L – 1) – 2J1 – J2 DOF = 3(4 – 1) – 2(4) – (0) = 1 Slider crank mechanism Four Bar mechanism L = 4 , J1 = 4 pin connections, J2 = 0 L = 4 , J1 = 3 pin connections + 1 slider = 4 J2 = 0 DOF = 3(4 – 1) – 2(4) – (0) = 1