Download
1 / 4
40 likes | 177 Views
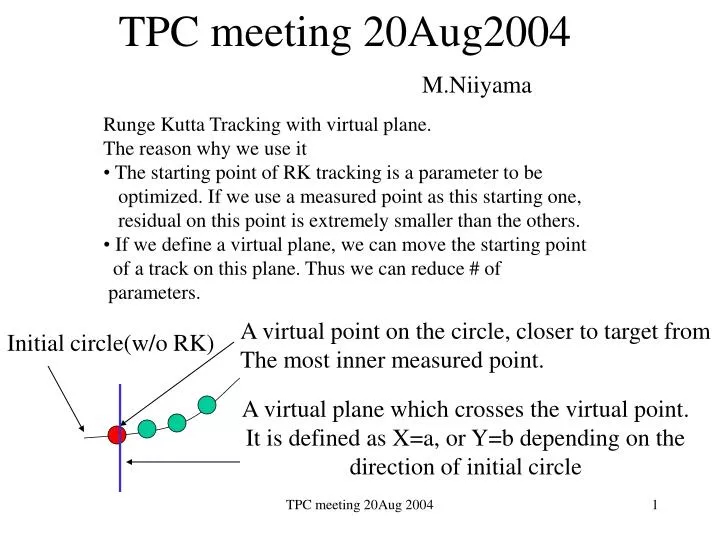
TPC meeting 20Aug2004. Runge Kutta Tracking with virtual plane. The reason why we use it The starting point of RK tracking is a parameter to be optimized. If we use a measured point as this starting one, residual on this point is extremely smaller than the others.

E N D
TPC meeting 20Aug2004 • Runge Kutta Tracking with virtual plane. • The reason why we use it • The starting point of RK tracking is a parameter to be • optimized. If we use a measured point as this starting one, • residual on this point is extremely smaller than the others. • If we define a virtual plane, we can move the starting point • of a track on this plane. Thus we can reduce # of • parameters. M.Niiyama A virtual point on the circle, closer to target from The most inner measured point. Initial circle(w/o RK) A virtual plane which crosses the virtual point. It is defined as X=a, or Y=b depending on the direction of initial circle TPC meeting 20Aug 2004
Residuals in phi, layer2 Residuals in Z, layer 0,1,12 We can see layer dependence->Sawada-kun TPC meeting 20Aug 2004
Residuals of Z correlate on the dip angle (angle between track and pad plane) we don’t have such a large dip angle track in CR data. The source of this effect is not found layer8 layer1 TPC meeting 20Aug 2004
What we need to push on the analysis? • The mass distribution of Lambda(1115) was obtained. • We can study momentum resolution. • Detection efficiency of decay topology • Pile up effect. • Momentum matching with dipole • ExB effect (Sawada) • Particle ID issue (nobody is working on ( ask J.Y?)) • Calibration of TPC gain -> How? Ask advice Tang-san • Wave form analysis • Calibration of Scinti. Gain -> Cosmic Rays • Time of Flight in TPC TPC meeting 20Aug 2004