Download
1 / 9
100 likes | 402 Views
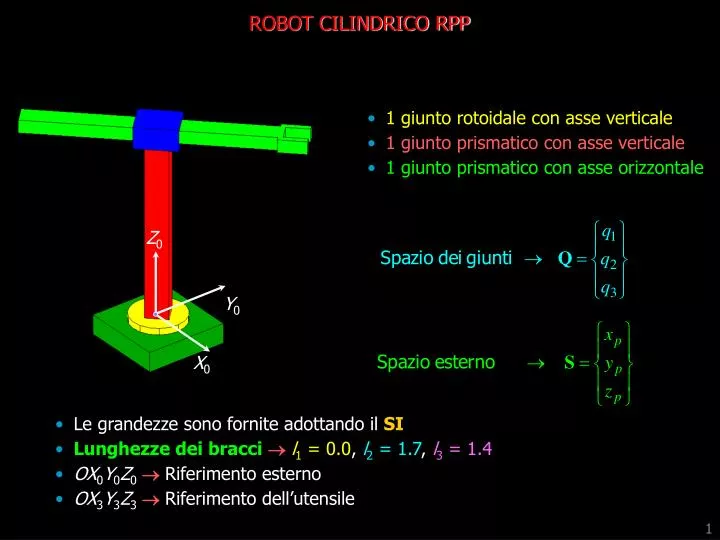
Z 0. Y 0. X 0. ROBOT CILINDRICO RPP. 1 giunto rotoidale con asse verticale 1 giunto prismatico con asse verticale 1 giunto prismatico con asse orizzontale. Le grandezze sono fornite adottando il SI Lunghezze dei bracci l 1 = 0.0 , l 2 = 1.7 , l 3 = 1.4

E N D
Z0 Y0 X0 ROBOT CILINDRICO RPP • 1 giunto rotoidale con asse verticale • 1 giunto prismatico con asse verticale • 1 giunto prismatico con asse orizzontale • Le grandezze sono fornite adottando ilSI • Lunghezze dei bracci l1 = 0.0, l2 = 1.7, l3 = 1.4 • OX0Y0Z0 Riferimento esterno • OX3Y3Z3 Riferimento dell’utensile
Z0 Y0 X0 Impostazione del problema dinamico • Disporre le terne locali in base alla convenzione di Denavit-Hartenberg secondo i seguenti parametri • Impostare per un moto assegnatoil problema dinamico inverso, in presenza di azioni esterne,per determinare • le azioni da esercitare ai giunti per realizzare il moto assegnato • l’energiacinetica totaledel manipolatore durante il moto assegnato • il valore del momento d’inerziaridotto al 1o giuntoper il moto assegnato • Impostare il problema dinamico direttoper determinare il moto del manipolatore per un assegnato sistema di forze esternee azioni ai giunti
Impostazione della pianificazione del movimento • Per il robot in considerazione si imposti il problema per la pianificazione del movimento, con assegnati per ogni giunto velocità, accelerazione e decelerazione massime, per il movimento punto-punto con le leggi di moto • con accelerazione costante a tratti e minimizzazione della potenza specifica • perla riduzione delle vibrazioni e tempo di esecuzione T minimo • traiettoria polinomiale del 5° ordine • traiettoria polinomiale del 7° ordine Analizzare e confrontare dal punto di vista sia cinematico sia dinamico le 3 traiettorie proposte
Applicazione numerica tramite Matlab • Impiegando le formulazioni del problema dinamico e della pianificazione del movimento sviluppare i seguenti programmi • Programma P_P.m per il movimento punto-punto,con le tre traiettorie proposte; il programma deve funzionare con qualsiasi tipo di ingresso nell’ambito delle specifiche di seguito fornite • Dati d’ingresso • il fileBracci.mat contenente le caratteristiche dei bracci; il file viene fornito • Lun: lunghezze dei tre bracci • il fileGiunti.mat contenente le velocità VMAx e le accelerazioni AMax massime per ogni giunto; il file viene fornito • un file chiamato Punto_Punto.mat contenente • la matrice PuEs contenente in ciascuna riga i punti estremi del percorso in coordinate esterne • la variabile npr contenente il numero di punti per la rappresentazione
2 • Risultati: per i file d’ingresso forniti effettuare • grafici della traiettoria con il programma PoVeAc.m; le variabili dei giunti e le rispettive derivate devono essere calcolate per via analitica • simulazione del movimento con il programma RPP.p • un file chiamatoTraiettoria.matcontenente i le variabili di giunto QG, QGp e QGpp e TempoEsecuzione impiegate in PoVeAc.m Commentare i risultati ottenuti per alcuni casi numerici significativi confrontando le tre traiettorie e le implicazioni di carattere dinamico.
3 • Programma Din_inv.m per la soluzione problema dinamico inverso,in presenza di gravità • Dati d’ingresso • il fileBracci.mat contenente le caratteristiche dei bracci; il file viene fornito • Lun: lunghezze dei tre bracci • CeMaN:coordinate del centro di massa rispetto alla terna locale N • Ms: masse dei tre bracci • JciN:tensore d’inerzia rispetto alla terna centrale d’inerzia: gli assi della terna locale N sono equi-orientati rispetto alla terna centrale • un file chiamato Traiettoria.mat contenente le variabili di giunto QG, QGp e QGpp e TempoEsecuzione nel formato impiegato dal programma PoVeAc.m
4 • Risultati: per i file d’ingresso forniti effettuare • grafici delle azioni dei giunti, dell’andamento dell’energiacinetica globale e dell’inerziatotale vista dal 1o giunto eseguiti con il programma AzECIn.m; • simulazione del movimento con il programma RPP.p • un file chiamatoDina.matcontenente, nel formato impiegato dal programma AzECIn.m, • t:vettore dei tempi • Azio:azioni esercitate ai giunti • EnCi:energia cinetica globale • In1: inerzia totale vista dal 1o giunto
5 • Programma Din_Dir.m per la soluzione problema dinamico diretto,in presenza di gravità,effettuando un’integrazione numerica con un metodo che sia almeno del secondo ordine. • Dati d’ingresso • il fileBracci.mat contenente le caratteristiche dei bracci; il file viene fornito • Lun: lunghezze dei tre bracci • CeMaN:coordinate del centro di massa rispetto alla terna locale N • Ms: masse dei tre bracci • JciN:tensore d’inerzia rispetto alla terna centrale d’inerzia: gli assi della terna locale N sono equi-orientati rispetto alla terna centrale • il fileCondIn.mat contenente le Condizioni Iniziali; il file viene fornito • un file chiamato Dina.mat contenente le azioni esercitate ai giunti Azio e il vettore dei tempi t nel formato impiegato dal programma AzECIn.m
6 • Risultati: per i file d’ingresso forniti effettuare • grafici della traiettoria con il programma PoVeAc.m; le variabili dei giunti e le rispettive derivate devono essere calcolate per via analitica • simulazione del movimento con il programma RPP.p • un file chiamatoTraiettoria.matcontenente le variabili di giunto QG, QGp e QGpp e TempoEsecuzione impiegate in PoVeAc.m • tramite il programma per la dinamica inversa, una valutazione delle traiettorie ottenute • Commentare i risultati numerici ottenuti nei casi in cui si raggiunge o meno la velocità massima