Download

1 / 23
280 likes | 573 Views
Grundlagen der Stabilität. Segelkutter ZK 10 „gekentert“. Inhalt: Schiffsbewegungen Fahrt- und Steuerverhalten Schwimmfähigkeit Begriffsbestimmungen aus der Stabilitätslehre Formstabilität Gewichtsstabilität Leckstabilität Tiefgang und Freibord Rollwinkel und Stabilität.

E N D
Grundlagen der Stabilität Segelkutter ZK 10 „gekentert“
Inhalt: • Schiffsbewegungen • Fahrt- und Steuerverhalten • Schwimmfähigkeit • Begriffsbestimmungen aus der Stabilitätslehre • Formstabilität • Gewichtsstabilität • Leckstabilität • Tiefgang und Freibord • Rollwinkel und Stabilität
Die Gesamtheit der Manöverkennwerte sind Ausdruck des gesamten Verhalten eines Bootes in seinen drei Achsen. Die Achsen bezeichnen sich mit den Ausdrücken: ·Gieren; ·Stampfen; ·Rollen. Daneben tritt ein Längsversatz in Voraus oder Achterausrichtung und der Querversatz zu einer Schiffsseite nach Stb oder Bb auf. Auch kann der gesamte Schiffskörper abtauchen.
z y x x Achse ist die Kurs oder Gierachse y Achse ist die Rollachse z Achse ist die Stampfachse (Drehachse)
z’ 0° Stampfwinkel y‘ 0° Rollwinkel X‘ 0° Gierwinkel z‘ y‘ x’
Systematik des Bewegungsverhaltens eines Schiffes bei der Fahrt und beim Manövrieren Steuerverhalten beim Kurshalten und beim Manövrieren mit der Steuereinrichtung Fahrtverhalten bei konstanter Fahrt und beim Manövrieren mit der Vortriebseinrichtung Kurs- halten Fahrtrichtungsänderung (Drehen undStützen) konstante Fahrt Fahrt- änderung Fahrtbestimmung (Meilenfahrt) Drehkreis Rückführ- manöver Spiraltest oder Pull-out-Manöver Aufstoppen (Stoppstecke) freier Auslauf (Auslaufstrecke)
Grundlagen der Stabilität Stabilität ist die Fähigkeit des Bootes, sich aus einer geneigten Lage, die durch die Einwirkung äußerer Kräfte entstanden ist, wieder aufzurichten, wenn die äußeren Kräfte nicht mehr wirken. Diese äußeren Kräfte können sein: seitlicher Wind, Drehmanöver, Seegang, Ladungsverschiebungen, Fluten von Schiffsräumen. Die Größe der Stabilität ist abhängig von der Rumpfform und der Gewichtsverteilung des Bootes (Trimm) und ergibt sich aus der Lage des Form- und Gewichtsschwerpunktes zueinander.
WL Definition der Schwimmfähigkeit (nach Archimedes) FG G f F FF G: Gewichtsschwerpunkt F: Verdrängungsschwerpunkt, Formschwerpunkt FG = FF
Schwerkraftverteilung längs des Bootes Auftriebsverteilung längs des Bootes FSchwerkraft FSchwerkraft FAuftrieb
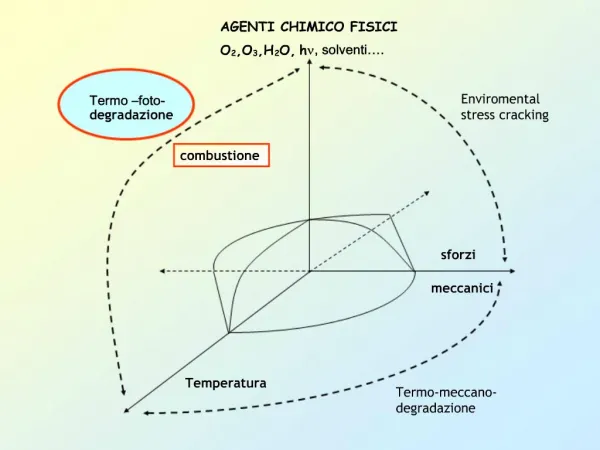
Lokale Lasten am Schiffskörper • Wasserdruck, statisch und dynamisch (Slamming) • Winddruck • Tankdrücke • Fundamentkräfte • Transportlasten • Verstärkt durch Beschleunigungskräfte (durch Tauchen, Stampfen, Rollen)
Starke Biegemomente am Schiffsrumpf entstehen bei: 1. Fahrt in ungünstigem längslaufenden Seegang - Wellenberglage - Wellentallage 2. Grundberührung 3. Großer Leckwassereinbruch 4. Unsachgemäßer Beladung oder Entladung der Schiffe
Begriffsbestimmungen Gesamtgewicht (FG) Schwerkraft Gewichtsschwerpunkt (G) Masseschwerpunkt Wasserlinie Formschwerpunkt (G) (Auftriebsschwerpunkt) Auftriebskraft (FF)
Wenn die Schwerkraft größer der Auftriebskraft ist, taucht das Boot tiefer ein. Wenn die Schwerkraft kleiner der Auftriebskraft ist, taucht das Boot weiter aus, bis wieder Kräftegleichgewicht herrscht. Kann auch im vollgetauchtem Zustand keine Gleichheit der Kräfte erreicht werden, sinkt das Boot. Zur Gewährleistung guter Seeeigenschaften ist eine bestimmte Reserveschwimmfähigkeit erforderlich. Ihre Größe ergibt sich aus dem Volumen des wasserdichten Überwasserteiles eines Bootes.
Metazentrum (M) Aufrichtendes Moment Gewichtsschwerpunkt (G) Wasserlinie Auftriebsschwerpunkt (F) h Formstabilität Von Formstabilität wird dann gesprochen, wenn der Gewichtsschwerpunkt über dem Formschwerpunkt liegt. Jollen und offene Boot (Marinekutter und Kutter ZK 10), ohne wesentliche Kielmassen besitzen nur Formstabilität durch die breite bzw. flache Rumpfform.
Gewichtsschwerpunkt (G) Metazentrum (M) Wasserlinie Auftriebsschwerpunkt (F) h Krängendes Moment
M’ G’ G M Wasserlinie F h’ h Erhöhung der Formstabilität durch Gewichtsverlagerung
M G Wasserlinie h G’ F Erhöhung der Formstabilität durch Gewichtsverlagerung h’
Gewichtsstabilität Bei Gewichtsstabilität liegt der Gewichtsschwerpunkt (G) unter dem Formschwerpunkt (A). Gewichtsstabilität besitzen Kielboote (Yachten) durch den sehr schweren und tiefliegenden Kiel. Bei zunehmender Kränkung wächst der Hebelarm (h) durch das Auswandern des Formschwerpunktes ständig an, so dass bei einer Kränkung von 90° sogar das größte aufrichtende Moment entsteht. Das Boot richtet sich also immer auf.
M M G F F h G h
Tiefladelinien für Marine- und Handelsschiffe Grenztiefgangsmarke Freibordmarke Handelsschiffe Marine
Zusammenhang zwischen Stabilität und Rollbewegung Die Rollzeit ist die Zeit für eine vollständige Rollschwingung, z.B. von Backbord über Steuerbord nach Backbord. Sie hängt von der Schiffsgröße und von der Stabilität ab ! Die Stabilitätsüberwachung an Bord kann unter Zuhilfenahme der Rollzeitformel erfolgen. Allgemein gilt für die Bordpraxis, dass ungewöhnlich lange Rollzeiten stets ein Anzeichen für eine Stabilitätsverschlechterung sind !