Download
1 / 16
180 likes | 371 Views
Why Robots Communicate. Manuela Veloso Somchaya Liemhetcharat. Sensing, Actions, and Communication. Robots make decisions based on their sensing : without coordination, two robots could decide conflicting actions based on their sensing, e.g., vision.

E N D
Why Robots Communicate Manuela Veloso Somchaya Liemhetcharat
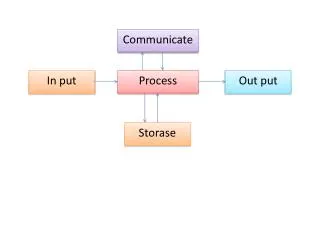
Sensing, Actions, and Communication • Robots make decisions based on their sensing: without coordination, two robots could decide conflicting actions based on their sensing, e.g., vision. • Robot soccer example: if two robots see the ball, they could both decide to go to the ball. Instead, by communicating what theysense, they can coordinate their actions. • Leader-follower example: a “leader” robot senses a path and by communicating actions to the “follower” robot, both robots can move along the path together.
Robot Coordination using Communication • Communicating sensing to coordinate roles, i.e., to assign actions to each robot Example video: in the CMU RoboCup Humanoid NAO team 2010, two robots communicate their distance to the ball, to decide which one is: • the Attacker, i.e., the one that scores goals, • the Defender, i.e., the one that blocks goals.
2. Each robot communicates to the other its distance to the ball as seen by its own vision.
3. The robot closest to the ball becomes the Attacker. 4. The other robot becomes the Defender.
5. The Attacker approaches the ball. 6. The Defender stays in position.
7. The Attacker gets ready to kick the ball. 8. The Defender heads to a defensive position.
Robot Coordination using Communication • Communicating sensing to coordinate roles, i.e., to assign actions to each robot • Communicating actions to coordinate roles Example video: in the CMU RoboCup Humanoid NAO team 2010, one robot sees the ball, communicates actions to the other, and decides which one: • approaches the ball and is the Attacker, • moves aside and is the Defender.
2. The robot seeing the ball communicates actions to the other and assigns roles.
3. The robot that sees the ball is the Attacker. 4. The other robot is the Defender.
5. The Attacker heads to the ball. 6. The Defender moves aside to clear the shot to the goal.
Robot Coordination using Communication • Communicating sensing to coordinate roles, i.e., to assign actions to each robot • Communicating actions to coordinate roles • Other examples: • Pushing a large object with multiple robots • Searching a room for an object