Download
1 / 9
90 likes | 219 Views
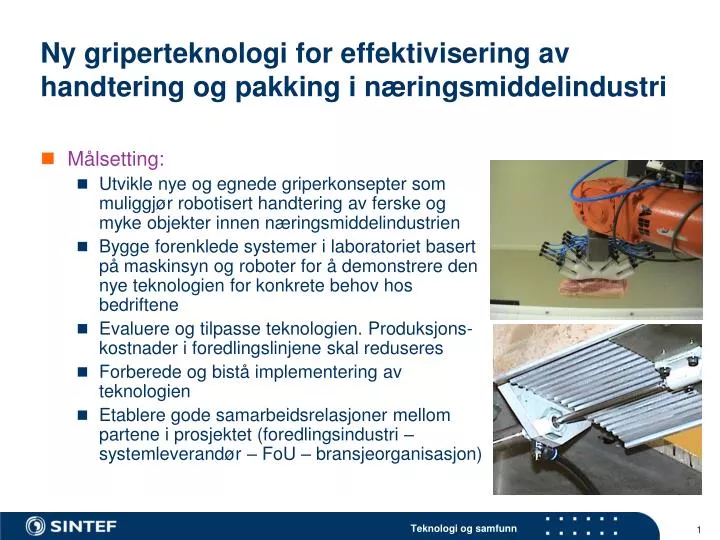
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddelindustri. Målsetting: Utvikle nye og egnede griperkonsepter som muliggjør robotisert handtering av ferske og myke objekter innen næringsmiddelindustrien

E N D
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddelindustri • Målsetting: • Utvikle nye og egnede griperkonsepter som muliggjør robotisert handtering av ferske og myke objekter innen næringsmiddelindustrien • Bygge forenklede systemer i laboratoriet basert på maskinsyn og roboter for å demonstrere den nye teknologien for konkrete behov hos bedriftene • Evaluere og tilpasse teknologien. Produksjons-kostnader i foredlingslinjene skal reduseres • Forberede og bistå implementering av teknologien • Etablere gode samarbeidsrelasjoner mellom partene i prosjektet (foredlingsindustri – systemleverandør – FoU – bransjeorganisasjon)
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddelindustri - Prosjektorganisering • Prosjektleder: Fiskeri- og havbruksnæringens Landsforening Industri og eksport v/Kristian Prytz • FoU-institutt: SINTEF Teknologi og samfunn + andre institutt etter behov • Industripartnere: • Melbu Fiskeindustri • SalMar Processing • GILDE Bøndernes Salgslag • Maskon • Finansiering av teknologiutvikling (2005 og 2006): • NFR: 540’ + 510’ = 1.050’ NOK • FHF/IN: 900’ + 900’ = 1.800’ NOK • GILDE/Norsk Kjøtt: 290’ + 120’ = 410’ NOK • SUM: 1.730’ + 1.530’ NOK = 3.260’ NOK
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddelindustri - Kostnadsbudsjett
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddel-industri - Analysefase • Behovsanalyse i 3 foredlingsbedrifter • Avklare aktuell foredlingslinje og produktgrunnlag • Spesifikke utfordringer for griperfunksjon og handteringssystem beskrives • Lønnsomhetskalkyle for 3 foredlingsbedrifter • Beskrive produksjonskostnader for eksisterende operasjon(er) • Beregne lønnsomhet for investering i robotisert handteringsløsning • Kravspesifikasjon for 3 foredlingsbedrifter • Krav til griperløsning • Krav til helhetsløsning for automatisert handtering
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddel-industri - Griperutvikling • Utvikling av tilpassede gripere for ”non-rigid objects” • Hvitfisk porsjonsbiter • Laks porsjonsbiter • Myke kjøttprodukter • Eventuelt andre produkter • Utvikling av tilpassede gripere for ”semi-rigid objects” • Ferske skinker og/eller steiker • Eventuelt andre aktuelle produkter • Teste og evaluere gripere
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddel-industri - Robotisert helhetsløsning • Utvikle og prosjektere delsystemer i en integrert helhetsløsning for handteringssystem • For Melbu Fiskeindustri • For SalMar • For GILDE BS • Bygge og teste forenklet helhetsløsning i NTNU/SINTEFs laboratorium • Evaluere testresultater og tilpasse løsninger
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddelindustri - Utvikle klassifikasjonssystem for griperkonsepter • Utarbeide krav til klassifikasjonssystem for gripere i robotiserte løsninger, med formål: • Bistå bedrifter i valg av prinsipp for griping • Bistå i evaluering av griperkonsepter • Vise fordeler og ulemper med ulike løsninger • Utvikle et klassifikasjonssystem • Implementere viten om ulike griperprinsipp • Bygge opp systematikk for systemet • Beskrive og etablere hovedstruktur i klassifikasjonssystemet • Teste ut bruk av systemet for en antall behov • Evaluere og forbedre systemet
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddelindustri - Implementering av robotisert helhetsløsning • Avdekke behov for økt kompetanse i de 3 bedriftene • Utarbeide kursunderlag og annet undervisningsmateriell • Avholde opplæring i bedriftene • Bistå i øvrige forberedende tiltak i bedriftene for implementering av ny teknologi
Ny griperteknologi for effektivisering av handtering og pakking i næringsmiddel-industri - Informasjons- og resultatspredning • Avholde seminar/workshop i regi av FHL Filetforum • Etter halvgått løp, ultimo 2005 • Ved avslutning, ultimo 2006 • Artikler i fagtidsskrifter • Artikler i aviser og andre massemedia • Andre resultatspredningstiltak