Download
1 / 14
140 likes | 267 Views
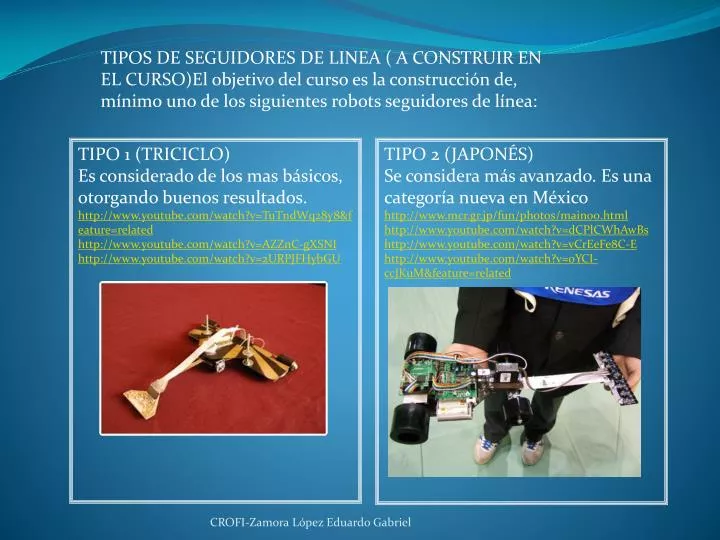
TIPOS DE SEGUIDORES DE LINEA ( A CONSTRUIR EN EL CURSO)El objetivo del curso es la construcción de, mínimo uno de los siguientes robots seguidores de línea:. TIPO 1 (TRICICLO) Es considerado de los mas básicos, otorgando buenos resultados.

E N D
TIPOS DE SEGUIDORES DE LINEA ( A CONSTRUIR EN EL CURSO)El objetivo del curso es la construcción de, mínimo uno de los siguientes robots seguidores de línea: TIPO 1 (TRICICLO) Es considerado de los mas básicos, otorgando buenos resultados. http://www.youtube.com/watch?v=TuTndWq28y8&feature=related http://www.youtube.com/watch?v=AZZnC-gXSNI http://www.youtube.com/watch?v=2URPJFHybGU TIPO 2 (JAPONÉS) Se considera más avanzado. Es una categoría nueva en México http://www.mcr.gr.jp/fun/photos/main00.html http://www.youtube.com/watch?v=dCPlCWhAwBs http://www.youtube.com/watch?v=vCrEeFe8C-E http://www.youtube.com/watch?v=oYCI-ccJKuM&feature=related CROFI-Zamora López Eduardo Gabriel
Lo mas importante; para cualquiera de los dos tipos es la mecánica y también es de las mas complicadas (en su construcción) , el plan a seguir es el siguiente: Los dos diseños mecánicos constan de dos partes: 1.- El sistema de dirección 2.-El sistema de tracción La mecánica del robot se parece mucho al de una bicicleta. CROFI-Zamora López Eduardo Gabriel
ESPECIFICACIONES DE TIPO 1 “TRICICLO” http://www.youtube.com/watch?v=8galkd9bpN0 Sistema de dirección. Es importante recalcar que este motor debe poder girar en ambos sentidos. (SOLO SE MUESTRA GIRO EN UN SENTIDO) CROFI-Zamora López Eduardo Gabriel
Estos dos motores, tienen un engrane tipo sin fin; sin embargo no son iguales. La principal diferencia radica, en que el motor con engrane de metal no se saldrá del eje fácilmente. Por otro lado el engrane sin fin del otro motor si saldrá fácilmente (debido a excesivas vibraciones del sistema) y tendremos que agregar una pequeña barra para que esto no suceda. Baleros o rodamientos como los mostrados a la izquierda son los que se pueden emplear. CROFI-Zamora López Eduardo Gabriel
Para el ROBOT se usan rodamientos (baleros) por las revoluciones que se generan y podemos emplear dos tipos de baleros: Baleros con ceja. Pequeño borde en la parte superior Baleros sin ceja o planos Se recomienda el uso de baleros con ceja; ya que estos quedarán “empotrados” en nuestra superficie. CROFI-Zamora López Eduardo Gabriel
Sistema de tracción: Emplearemos motores como los mostrados en la imagen de la derecha: Además del motor de reducción, haremos uso de engranes para reducir la velocidad del motor y ganar torque, gracias al torque ganado podremos desplazar a todo nuestro prototipo en conjunto. Esta adaptación se realiza generalmente con uno o varios pares de engranajes que adaptan la velocidad y potencia mecánica montados en un cuerpo compacto denominado reductor de velocidad aunque en algunos países hispano parlantes también se le denomina caja reductora o motorreducción. http://www.youtube.com/watch?v=nTS3Qm3763E http://es.wikipedia.org/wiki/Reductores_de_velocidad CROFI-Zamora López Eduardo Gabriel
Entre las características importantes; destacan las mostradas en la siguiente tabla. Gear ratio es la relación entre el primer engrane (el que está directamente al eje del motor) y el ultimo engrane (al eje de nuestra rueda). Por ejemplo 10:1 significa que el primer engrane cuando de diez giros el ultimo dará solamente un giro, esto se traduce en las revoluciones por minuto (rpm) en este caso se observa que tenemos 3000 rpm pero tenemos un torque cuando el motor está detenido (stall torque) de 4 oz . In Si observamos el motor de abajo muestra una relación 1000:1 lo que se traduce en un 32 rpm y nos brinda un torque de 125 oz.in CROFI-Zamora López Eduardo Gabriel
http://www.youtube.com/watch?feature=iv&annotation_id=annotation_225660&v=CaZZ5GPLL98&src_vid=7ogq5OcAx7whttp://www.youtube.com/watch?feature=iv&annotation_id=annotation_225660&v=CaZZ5GPLL98&src_vid=7ogq5OcAx7w Cuando necesite mucho mas potencia en su motor engranado el motor de abajo, es la mejor alternativa con el mismo tamaño le ofrece tres veces más velocidad y 2 veces más par. Pero cuidado consume mucho más energía. A 5V nos ofrece 114RPM con un consumo de 270mA. Este motor (abajo) con engranaje es una miniatura (0,94 "x 0,39" x 0,47 "), de alta calidad, bajo la corriente del motor con 50:1 caja de metal. Estas unidades tienen un 0.365 "de largo, 3 mm . de diámetro en forma de D eje de salida de las especificaciones clave de 6 V: 250 RPM y 40 mA de recorrido libre, 7 oz-in (0,5 kg-cm) y 0,36 de la pérdida. CROFI-Zamora López Eduardo Gabriel
ESPECIFICACIONES DE TIPO2 “JAPONÉS” Sistema de dirección. http://www.youtube.com/watch?v=YOARA6V4uZY http://www.youtube.com/watch?v=h_2NGYh8d1k http://www.youtube.com/watch?v=RR9HPBMuC_A Sin dirección ackerman Con dirección Ackerman http://www.youtube.com/watch?feature=player_embedded&v=jPxJRQU8tN4 http://www.youtube.com/watch?v=9R7vsavjt40&feature=related CROFI-Zamora López Eduardo Gabriel
http://www.mcr.gr.jp/fun/photos/12_3.html CROFI-Zamora López Eduardo Gabriel
Sistema de tracción: Se puede observar en esta imagen y en las anteriores, que acomodan los motores de tal manera que coinciden con un engrane en cada llanta. CROFI-Zamora López Eduardo Gabriel
¿Qué es un servomotor y cómo funciona? http://www.youtube.com/watch?v=84mxq41zdwE CROFI-Zamora López Eduardo Gabriel