Download
1 / 77
780 likes | 1.08k Views
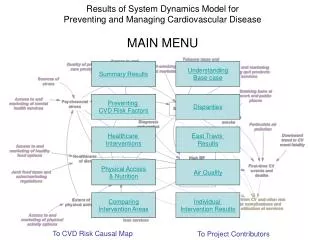
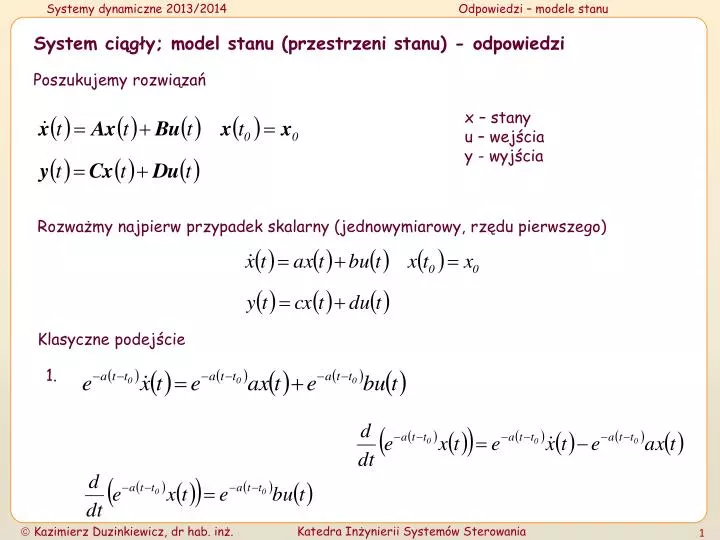
System ciągły; model stanu (przestrzeni stanu) - odpowiedzi. Poszukujemy rozwiązań. x – stany u – wejścia y - wyjścia. Rozważmy najpierw przypadek skalarny (jednowymiarowy, rzędu pierwszego). Klasyczne podejście. 1. 2. 3. Składowa wymuszona. Składowa swobodna. 4. Przykład.

E N D
System ciągły; model stanu (przestrzeni stanu) - odpowiedzi Poszukujemy rozwiązań x – stany u – wejścia y - wyjścia Rozważmy najpierw przypadek skalarny (jednowymiarowy, rzędu pierwszego) Klasyczne podejście 1.
2. 3. Składowa wymuszona Składowa swobodna
Przykład x(t) = uc(t) vC(0- ) = 1V
System ciągły; model stanu (przestrzeni stanu) – odpowiedzi Poszukujemy rozwiązań x – stany u – wejścia y - wyjścia Weźmy równanie stanu: Rozwiązanie: Składowa swobodna Składowa wymuszona
Składowa swobodna – rozwiązanie równania jednorodnego Rozwiązanie równania jednorodnego proponujemy w postaci: gdzie Sprawdzenie
Rozwiązanie ogólne – rozwiązanie równania jednorodnego, zatem: gdzie Przejdziemy do wyznaczenia rozwiązania szczególnego – składowej wymuszonej – rozwiązania równania niejednorodnego Rozwiązanie równania niejednorodnego proponujemy w postaci:
Rozwiązanie to musi spełniać równanie niejednorodne z drugiej strony, podstawiając proponowane rozwiązanie do równania stanu porównując
podstawiając ostatni wynik do proponowanego rozwiązania Rozwiązanie szczególne – rozwiązanie równania niejednorodnego, zatem: Podsumowując – rozwiązanie równania stanu Składowa wymuszona Składowa swobodna
Weźmy równanie wyjścia: Wyjście policzymy podstawiając uzyskany wynik rozwiązania równania stanu Podsumowanie:
Kluczowy problem przy korzystaniu z tego rozwiązania – obliczenie - macierz tranzycji stanu – macierz fundamentalna I sposób – z definicji szeregu wykładniczego
Przykład 1: Model części mechanicznej silnika prądu stałego, przy zaniedbaniu dynamiki obwodu twornika, wpływu na ten odwód obwodu wzbudzenia i pominięciu momentu obciążenia zewnętrznego można zapisać Przyjmując: otrzymamy Przyjmijmy dla uproszczenia rachunków: oraz
Korzystamy z definicji Czasem nie ma potrzeby liczenia granicy szeregu Przykład 2:
II sposób pokażemy znajdując najpierw model przestrzeni stanu w dziedzinie zmiennej s
Przez porównanie rozwiązania równania stanu i wyjścia Możemy napisać
Przykład 3: macierz dołączona wyznacznik
Otrzymujemy Ostatecznie macierz tranzycji
Przykład 4: Policzymy odpowiedzi układu przy zadanych warunkach początkowych na jednostkowe wymuszenie skokowe Policzmy najpierw:
Stąd: Stąd bezpośrednio:
Dla podanych warunków początkowych składowa swobodna odpowiedzi stanu i wyjścia :
Dla skokowego jednostkowego wejścia transformata Laplace’a składowej wymuszonej odpowiedzi stanu i wyjścia (w dziedzinie zmiennej s)
Dla skokowego jednostkowego wejścia składowa wymuszona odpowiedzi stanu i wyjścia Pełna odpowiedź stanu i wyjścia
Związki z transmitancją Dla układu SISO: Odpowiedź wyjścia: Funkcja przejścia - transmitancja Funkcja tranzycji stanu
Otrzymaliśmy: Transmitancja: Odpowiedź impulsowa:
System dyskretny; model stanu (przestrzeni stanu) – odpowiedzi Poszukujemy rozwiązań Będziemy przyjmowali: Rozwiązanie równania stanu w postaci rekursywnej:
W ogólnej postaci: Macierz tranzycji stanu: Jest to odpowiednik w dziedzinie czasu ciągłego macierzy Porównanie odpowiedzi stanu Składowa wymuszona Składowa swobodna
Odpowiedź wyjścia: Możemy np. policzyć odpowiedź wyjścia na sekwencję impulsu jednostkowego:
Transformata Z Odpowiednikiem transformacji s Laplace’a dla systemów ciągłych jest transformacja z dla systemów dyskretnych Interesują nas podobnie: sygnały o wartości zero dla ujemnych chwil czasowych i jednostronna transformacja z Dwa alternatywne sposoby zdefiniowania: Definicja 1: Mając daną sekwencję sygnałów jej transformację z definiujemy jako Zmienną z-1 możemy traktować w podanej definicji jako operator opóźnienia w czasie – wskaźnik pozycji sygnału w sekwencji
Pożytki: Zastąpienie nieskończonego ciągu, jego sumą (szeregiem) mogącą mieć użyteczną postać do analizy Pytania: - istnienie sumy – zbieżność szeregu - możliwość odtworzenia z wynikowego wyrażenia zmiennej z, elementów sekwencji w dziedzinie czasu
Definicja druga związana jest z sekwencją uzyskaną z próbkowania z okresem Ts sygnału ciągłego i transformacją Laplace’a Ilustracja związków dziedzina ciągła – dziedzina dyskretna poprzez idealny impulsator gdzie
Definicja 2: Mając daną sekwencję sygnałów z próbkowania ciągłej funkcji f(t) z okresem T s w postaci Transformacja Laplace’a tej sekwencji dana jest Definiując zmienną z Otrzymujemy
Doszliśmy do określenia transformacji z lub z zastrzeżeniem, że transformata z istnieje tylko wtedy, gdy istnieje pewne z dla którego szereg z definicji jest zbieżny
Przykład 5 Rozważmy sekwencję skoku jednostkowego z określonym okresem próbkowania Mamy szereg jest zbieżny i transformata z istnieje Jeżeli Szereg geometryczny zbieżny
Przykład 6 Rozważmy funkcję Przy próbkowaniu z okresem Transformata z szereg jest zbieżny i transformata istnieje Jeżeli
Transformaty z wybranych sekwencji sygnałów Transformata Z Sekwencja
Wybrane właściwości - transformaty z funkcji przesuniętych w czasie gdzie k jest dodatnie oraz - przesunięcie wstecz - przesunięcie wprzód - twierdzenie o wartości początkowej - twierdzenie o wartości końcowej
Korzystając z definicji i podanych własności możemy dokonać transformacji dyskretnego równania stanu i znaleźć jego odpowiednik w dziedzinie zmiennej z otrzymamy Ostatnie równanie może być rozwiązane względem transformaty X(z) Wprowadzając oznaczenie Możemy to rozwiązanie zapisać w postaci
Przez porównanie rozwiązania równania stanu i wyjścia Możemy napisać
Dla skorzystania z tej ostatniej zależności potrzebna jest umiejętność przeprowadzania transformacji odwrotnej z, czyli znajdowania wartości funkcji w chwilach próbkowania Transformacja odwrotna znajduje tylko wartości funkcji w chwilach próbkowania, ale nie umożliwia znalezienia okresu próbkowania Dla znajdowania wartości funkcji w chwilach próbkowania – sekwencji wartości, praktycznie znajduje się wykorzystując dzielenie wielomianów rozkład na ułamki
Dzielenie wielomianów Z definicji transformacji Z Jeżeli w jakiś sposób potrafimy przedstawić funkcję F(z) w postaci to jest oczywiste, że Jeżeli F(z) jest funkcją wymierną – ułamkiem wielomianów, to wartości ci mogą być znalezione drogą dzielenia wielomianów
Przykład 7 Znaleźć f[k] - dzielimy licznik i mianownik przez największa potęgę z