Download
1 / 8
80 likes | 230 Views
PROCEDIMIENTO DE IDENTIFICACION. Figura 1. TIPOS DE SENSORES. IDENTIFICACION SENSOR OPTICO. CLARIFICACION SENSOR ACUSTICO. RESOLUCION A LA MAXIMA DISTANCIA. BUSQUEDA SENSOR ACUSTICO. TASA DE BUSQUEDA (mi²/hr). Figura 2. CONCEPTO DE LAS OPERACIONES DE LAS MEDIDAS CONTRA MINAS.

E N D
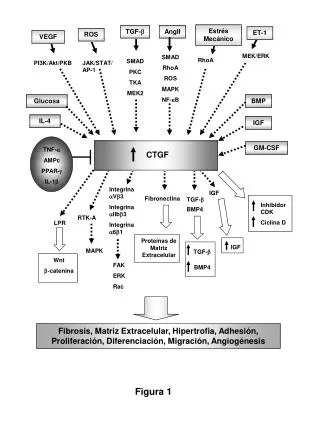
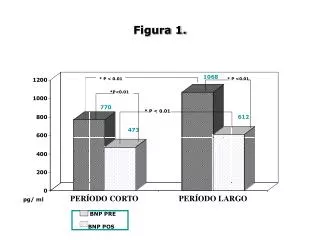
PROCEDIMIENTO DE IDENTIFICACION Figura 1
TIPOS DE SENSORES IDENTIFICACION SENSOR OPTICO CLARIFICACION SENSOR ACUSTICO RESOLUCION A LA MAXIMA DISTANCIA BUSQUEDA SENSOR ACUSTICO TASA DE BUSQUEDA (mi²/hr) Figura 2
CONCEPTO DE LAS OPERACIONES DE LAS MEDIDAS CONTRA MINAS Figura 3
MCM “ORGANICAS” Figura 4
SUVs + R0Vs CARACTERISTICAS Y CAPACIDADES P R O F U N C A R G A S A U T O N V E L O C D. O P E R C O M P A L I N K P A I S LONGITUD Y PESO S O N A R L L T V SUVs + ROVs Cable F.OP. 2,5m 1.000 Kg. 1 (100 Kg) PAP MK5 ECA FR 1 2 6 n. 300 m 2 h 200 m STN ATLAS Elektronik Cable F.OP. 3,5m 1.300 Kg. PINGUIN B3 GE 1 1 8 n. 200 m 2 1,5 h 500 m RECUPERABLES 1 (80 kg) Cable El. DOUBLE EAGLE BOFORS SW 1 1 6 n. 500 m Ilimitado 2m. 2m. 250 Kg. PLUTO PLUS GAYROBOT IT 1 1 7 n. 600 m 1 10 h 200 m 1 m 35 kg Cable F.OP. G.E.C. Marconi 1 1 ARCHERFISH 1 300 m 55 mi 7 n. IT 1,4 m 25 kg Cable F.OP. 15 mi RECUPERABLES MINESNIPER Kongsberg 1 1 NO 1 6 n. 500 m STN ATLAS Elektronik 1,3 m 40 kg Cable F.OP. SEAFOX 10 mi 1 6 n. 1 4000 m GE 1 600 m Figura 5
VEHICULOS AUVS AUV SYSTEMS 1 2 4 5 3 6 7 8 9 10 11 12 14 15 13 16 17 19 20 18 Figura 6 16.- SIMRAD HUGIN 17.- AUSI/IMTP SAUV 18.- AUSI EAVE 19.- UH ODIN 20.- WRC Glider 6.- Univ. Of Tokyo R-One Robot 7.- WHOI REMUS 8.- Sias/Patterson Fetch 9.- Maridan Martin 10.- NPS ARIES 1.- MIT Odyssey 2.- Lockheed CETUS 3.- SOC Autosub 4.- HBOI Ocean Voyager 5.- FAU Ocean Explorer 11.- Hylands MicroSeeker 12.- ISE Thesens 13.- Euromar Caravela 14.- ANU Kambara 15.- HEU Underwate Int. III
TIPICA VELOCIDAD PARA DIFERENTES SENSORES Y TIPOS DE MENSAJES Figura 7
CARACTERISTICAS DE DIFERENTES SISTEMAS ENERGETICOS PARA UNA CARGA DE 500 Wh DE UNA UUV DE 26,5” Figura 8