Download
1 / 41
410 likes | 571 Views
Hvorfor gjøre eksperimenter ?. Litteratur: Wilhelm Løchstøer : Fysiske målinger: Elementær måleteori og usikkerhetsregning s 1-30 + appendix. G.L. Squires . Practical physics, Cambridge university press, kapittel 2 og 3. Forelesningsnotater. Generelt om måling.

E N D
Litteratur: Wilhelm Løchstøer : Fysiske målinger: Elementær måleteori og usikkerhetsregning s 1-30 + appendix. G.L. Squires . Practical physics, Cambridge university press, kapittel 2 og 3. Forelesningsnotater. Generelt om måling • Resultat av en ideell måling er ett tall som gir måleobjektets ”sanne verdi”. • Ved en virkelig måling kan vi bare avgrense et tallområde hvor vi mener at • den sanne verdien vil ligge. • Resultatet avhenger bla. av hvordan målingen har blitt utført, hvem som utfører målingene, måleutstyr, støy.
Målefeil og måleusikkerhet • Målefeil: • Avvikene er konstante og systematiske og gjentar seg på samme måte fra gang til gang. • Avvikene kan ofte korrigeres • Måleusikkerhet: • Avvikene er av statistisk natur. Vi får snart litt høyere og snart litt lavere • verdier uten av kan på forhånd si noe om neste verdi. • Måleusikkerhet gjør resultatet ubestemt. Fordi vi ikke kan forutsi noe om avviket ved en • bestemt måling kan resultatet ikke korrigeres.
Kilder til usikkerhet • Måleobjektet selv • Definisjonsubestemthet. Eks: Temperaturen i et rom, tykkelsen av en ikke • jevn tråd. Usikkerhet kan reduseres ved en skarpere definisjon av måleobjekt, • og måleprosedyrer.
2. Instrumenter metode Instrumentet og dets nominelle spesifikasjoner. Reproduserbarhet av innstillinger, tykkelser av visere, begrenset antall siffer i digitale instrumenter eks . ADC kort. 3. Observatør og forsøksbetingelser Usikkerhet ved avlesning. Observatørens øvelse og ferdighet. Riktig belysning, rystelser vibrasjoner ol. 4. Naturlig støy Termiske fluktuasjoner (Johnsen Nyquist støy), seismisk støy, atmosfærisk støy (elektromagnetisk, hydrodynamisk) .
Angivelse av måleresultat • Ved fullstendig angivelse av måleresultat skal usikkerhet angis! • 2,04±0.05 • Det må komme klart frem om det er standardavvik av enkeltmålinger eller • standardavvik av middelverdi som angis. • Skal fremkomme om det er absolutt og relativ usikkerhet • Det skal angis så mange siffer at det siste siffer er usikkert (også i utregninger). • Man sier noe om usikkerheten i det antallet siffer man oppgir. • Feks: 2.0 cm (usikkerhet i mm) , 2.000cm (usikkerhet i 1/100mm) • Slipper aldri unna å angi usikkerhet !!!
Gjenntagelsesmålinger Observerte målinger: Antall ganger observert: Dersom de enkelte observasjonene er likeverdige og innbyrde uavhengige , så er middelverdien en god fikseringsverdi Fordelinger og histogram Normert fordelingsfunksjon:
P(x)dx er fraksjonen av målinger i intervallet [x,x+dx]. P(x)dx Er sannsynligheten for a finne en verdi x i intervallet [x,x+dx]. P(x) er en normert sannsynlighetstetthet. Normeringskrav Gjennomsnittsverdien av x til fordelingen <X>: Svarer til å midle over et stort antall målinger som definerer midlingen <>. P(x) Varians til fordelingsfunksjon p(x) : Hvor standardavvik et er Sann verdi X defineres som X= <X> X=<x> x
Avvik i målingene fra sann verdi Avvik av middelverdi fra sann verdi Midler over et stort antall sett med n målinger i hvert sett. hvor vi har antatt at er uavhengig av Per definisjon: Som gir:
Betrakt RMS (Root Mean Square) avviket: Størrelsen er kalt standardavviket til prøven Hvis vi gjør en midling over et stort antall målinger finner vi Dette gir Slik at For store n
Gyldighet av beregnet standardavvik , skjønnsmessig angivelse av usikkerhet Formelen : er god kun for store verdier av n (n>10). For få målinger , 5 til 10, er usikkerheten i standardavviket stort (typisk 25-35%) For små verdier av n er det ofte like godt Å gjøre en skjønnsmessig vurdering av s. Variasjonsområde= differansen mellom største og minste observerte verdi Grenseavviket = halve variasjonsområdet. Det skal alltid fremgå hvordan usikkerheten er anslått
Gauss, Normal fordeling . Erfaring viser at eksperimentell fordelinger ofte gir Gauss eller normal fordeling.
Maze pattern formed by drainage of granular suspension . Gausisk trykk fordeling
Hvis støyen som gir opphav til spredningen av variablen x består av et stort antall uavhengige (ukorrelerte) stepp, vil fordelingen bli Gausisk. Sentralgrenseteorem . Eksempel: diffusjon (virrevandring): x t
Eksempel fra imbibisjon i porøst medium. Front beveger seg med ulik Hastighet i de ulike porene.
Vis at: Sannsynlighet for å finne målt verdi i intervallet [-x,x]
Vanlig å regne data som ligger mer enn 2s unna som signifikant forskjellig. Vanligvis så er feilestimatene relativt grove . Usikkerheten i disse er ofte større betydning enn effekter som skyldes moderate avvik fra en Gausisk funksjon
Sammensatte målinger R(x,y,z,..) bestemmes ved direkte måling av x,y,z... Osv. Vi antar at x,y,z,... er uavhengige størrelser. Måling nr: 1 2 3 . . N ogstandardavvik For R har vi N verdier med middelverdi Tilsvarende for x, y, z.. osv
Avvik fra middelverdi av R: Vi finner: Hvis fordelingen av x,y,z, osv er symmetrisk om middelverdien dvs, like Stor sannsynlighet for positive og negative verdier så vil kryssledd kanseleres. Spesielt for potensfunksjoner
Tilpassing av måledata Eksempel: kapillærbølge Riktig å vise avvik fra tilpasset Funksjon fordi den viser kvaliteten på tilpassningen. 2s
Kan bestemme overflatespenning γ og viskositeten μ fra dispersjons Relasjonene:
Målemetode: Avbøyning av laserstråle. Ekstremt følsomt teknikk. Samme prinsipp brukes for AFM.
Lock-in forsterker teknikk Bruk av lock-in forsterker krever en referanse frekvens. Spesielt velegnet til eksperimenter hvor en driver systemet med en ytre frekvens og måler på Systemets respons. Virkemåte: Multipliserer målt signal med et periodisk signal med eksakt samme frekvens som eksternt signal. Faseskiftet mellomsignalene kan justeres. Virker som en fouriertransformasjon !!! Filtrerer ut støy.
Eksempler på andre fordelingsfunksjoner Boblefordeling av gass ved tofase Fortrengning i porøse medier
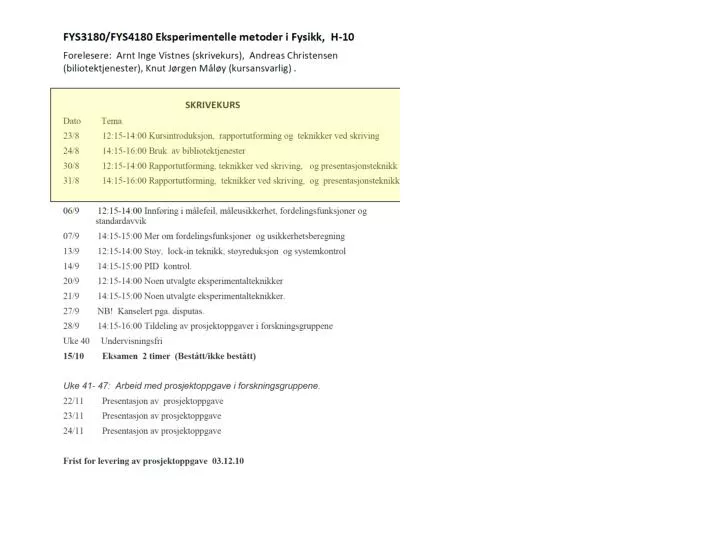
Brudd eksperiment 2.Optical and mechanical set-up • Optical tracking high speed & high resolution camera • 500 fps, 512×240 pixels → ~ 4300 frames • 1000 fps, 1024×512 pixels → ~ 12000 frames 25cm 15cm x y 0.4 μm.s-1 < h V i < 40 μm.s-1 1.7 μm < pixel size: a < 10 μm
Hatighetsfluktuasjoner målt ved oppsprekking av PMMA. Målt med ultra hurtig kamera 100000fps
F2 F1 2. Waiting time matrix M← front dynamics waiting time matrix obtained by adding fronts M2 0 0 0 1 0 0 0 2 1 0 1 0 2 0 1 1 0 2 0 0 0 0 1 0 0 0 0 0 0 0 M0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 Analysis procedure 1. Image analysis Raw image → front extraction M1 0 0 0 0 0 0 0 1 0 0 0 0 1 0 1 1 0 1 0 0 0 0 1 0 0 0 0 0 0 0
1. Image analysis 2. Final waiting time matrix M the darker parts the longer waiting times
Analysis procedure • Final waiting time matrix : M δt = 10 -3 s time delay between 2 pictures • M→ V : local front velocity matrix a pixel size δt time delay between 2 pictures m element in waiting time matrix • V → CV : clipped velocity matrix • local burst activity
local front dynamics Hastighetsfordeling av front -
Synchrotron radiation: Bending magnet Wiggler
ESRF Grenoble Energy 6 GeV. Dvs energien til elektronene i ringen. Bølgelengden på røntgenstrålingen er fra μm til Å
Bragg lov 2d sinθ = n λ
Oppgaver: 1) Vis at: • Anta at vi skal måle fokallengden til en linse ved å måle avstanden • a fra objekt til linse og avstanden b fra linse til bilde. Hva blir standard • avviket til f gitt at vi kjenner standardavviket til a og b. • Bestem den relative usikkerheten til overflatespenningen og • viskositeten ved måling av overflatebølger (se dispersjonsrelasjon). Anta • at frekvens, bølgelengde og tetthet er målt med en relativ usikkerhet • på 1%. gjelder: 4) Vis at for