Download
1 / 12
150 likes | 341 Views
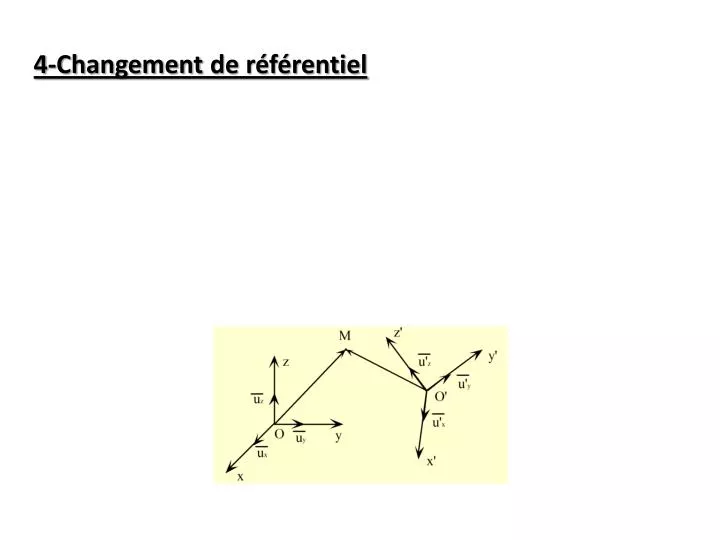
4-Changement de référentiel. dans (S). Le point mobile est repéré par:. dans (S'). On cherche à déterminer des relations entre l'expression du vecteur position (vitesse, accélération) dans le référentiel (S) et dans (S').

E N D
dans (S) Le point mobile est repéré par: dans (S') On cherche à déterminer des relations entre l'expression du vecteur position (vitesse, accélération) dans le référentiel (S) et dans (S'). Supposons la vitesse de (S') par rapport à (S) est toujours loin de la vitesse de la lumière; nous avons: 4.1.Calcul de la vitesse:
Remarques: Le calcul de la dérivée d'un vecteur unitaire fait apparaître la vitesse angulaire w. Ce dernier terme sera alors lié à une rotation du référentiel (S') par rapport à (S).
4.2.2.Représentation vectorielle Nous savons que la dérivée d'un vecteur unitaire peut s'exprimer comme: Si l'on attribue à w un vecteur perpendiculaire au plan déterminé par les vecteurs et de telle sorte que forment le trièdre direct Dans ce cas il est facile de voir que la dérivée du vecteur unitaire peut s'exprimer par le produit vectoriel:
vitesse d'entraînement: En utilisant = l'accélération:
et donc
Cas d'une translation rectiligne uniforme Dans le cas d'une translation rectiligne uniforme il n'y a pas de rotation, ni d’accélération de (S') par rapport à (S): Donc la vitesse est: Pour l'accélération on trouve:
Cas d'une rotation uniforme On considère une rotation autour de l'axe 0z'= 0z avec O' ne se déplace pas par rapport à O: en coordonnées cylindriques: Donc l'accélération mesurée dans le référentiel (S') est donnée par: l'accélération centrifuge l'accélération de coriolis