Download
1 / 33
340 likes | 1.01k Views
KVALITET SISTEMA AUTOMATSKOG UPRAVLJANJA. Kod projektovanja ili ocene kvaliteta sistema automatskog upravljanja kao što je regulisani elektromotorni pogon, bitna su tri kriterijuma: stabilnost statička karakteristika dinamička karakteristika Analiza prema redosledu i važnosti:

E N D
KVALITET SISTEMA AUTOMATSKOG UPRAVLJANJA Kod projektovanja ili ocene kvaliteta sistema automatskog upravljanjakao što je regulisani elektromotorni pogon, bitna su tri kriterijuma: • stabilnost • statička karakteristika • dinamička karakteristika Analiza prema redosledu i važnosti: stabilnost, zatim ponašanje u stacionarnom stanju, i na kraju kvalitet prelaznog režima. 3 kriterijuma
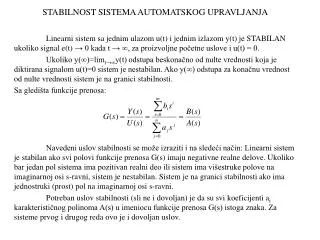
Stabilnost • Teorema Ljapunova o stabilnosti dinamičkih sistema Za linearne dinamičke sisteme • Algebarski kriterijumi stabilnosti • Grafo-analitički kriterijumi stabilnosti Алекса́ндр Миха́йлович Ляпуно́в, 1856-1918 Za stacionarne, kontinualne, fizički ostvarive, linearne sisteme sa koncentrisanim parametrima, potreban i dovoljan uslov za stabilnost jeste da svi koreni njegove karakteristične jednačine imaju negativne realne delove ili, što je isto, da leže u levoj poluravni kompleksne promenljive p. [1]. [1]. M. Stojić, Kontinualni sistemi automatskog upravljanja, Naučna knjiga, Beograd
Kontinualni sistemi Svi koreni karakteristične jednačine u levoj polovini kompleksne ravni: • U opštem slučaju, za kompleksna rešenja, uslov je Re(pj)<0, • U slučaju realnih rešenja karakteristične jednačine, uslov se svodi se na pj <0
Diskretni sistemi Potreban i dovoljan uslov za globalnu asimptotsku stabilnost linearnog digitalnog (diskretnog) sistema je da sve nule svojstvenog polinoma matrice A, odnosno svi koreni karakteristične jednačine budu po modulu manji od 1 ili, što je isto, da se nalaze unutar jediničnog kruga sa centrom u koordinatnom početku z ravni [1]. [1]. M. Stojić, Digitalni sistemi upravljanja, Nauka, Beograd
Statičke karakteristike Posmatrajmo sistem: u y + e W(p) _ Pretpostavimo da je sistem stabilan.
Greška je: Odnosno: Uzmimo dalje da se W(p) u opštem slučaju može predstaviti u obliku: r - je astatizam sistema
Astatizam sistema ako je r = 0 (nulti astatizam), ako je r = 1 (astatizam prvog reda), ako je r = 2 (astatizam drugog reda), Konstanta položaja Brzinska konstanta Konstanta ubrzanja
Sistem nultog astatizma - konstanta položaja Posmatrajmo sistem kada se na ulaz dovede odskočni signal: ako je r = 0, kp= kgreška postojie()=u0/(1+k) za r > 0, kp→∞ greška ne postojie(∞)→0.
Odziv sistema sa nultim astatizmom u vremenskom domenu. r > 0,kp→∞,greška ne postoji r = 0, kp = kgreška postoji
Sistemi sa astatizmom prvog reda - brzinska konstanta Posmatrajmo sistem kada se na ulaz dovede “rampa” funkcija: Primer „soft start”Konstantno ubrzanje. Greška se povećava. Greška ima konačnu vrednost. Greška ne postoji.
kp = k, greška postoji kv = 0, e(∞)→ ∞ Vremenski odziv sistema sa astatizmom nultog reda kada se na ulaz dovede “rampa” funkcija.
kp kv≠0kv=k Odziv sistema sa astatizmom prvog reda kada se na ulaz dovede “rampa” funkcija
kp kv Odziv sistemasa astatizmom drugog reda kada se na ulaz dovede “rampa” funkcija
Sistemi sa astatizmom drugog reda - konstanta ubrzanja Posmatrajmo sistem kada se na ulaz dovede eksponencijalna funkcija: Primer: zadavanje ciljne (referentne) pozicije kod sistema za pozicioniranje. Greška se povećava. Greška ima konstantnu vrednost. Greška ne postoji.
kp r=2 ku=k r=1<2, ku=0, e(∞)→∞ Greška se povećava Odziv sistemakada se na ulaz dovede signal sa kvadratnom zavisnosti od vremena
Statička greška kod sistema sa dva ulaza up – y x uu + F1(p) F2(p) + – uu – Upravljački ulaz up – Poremećaj
Statička greška kod sistema sa dva ulaza -----------------------
mm ω* Uprošćeni primer regulisanog pogona uu(t) up(t) t t mm – me ω + ω* k + –
mm ω* Odloženo dejstvo poremećaja uu(t) up(t) t t t0 mm – me ω + ω* k + –
Uprošćeni primer regulisanog pogona a) Proporcionalni regulator brzine, veoma brz odziv momenta, Njutnova jednačina ----------------------- -------------
Uprošćeni primer regulisanog pogona b) Proporcionalno-Integralni regulator brzine, veoma brz odziv momenta, Njutnova jednačina mm Kp – + me ω + ω* + – +
Uprošćeni primer regulisanog pogona b) Proporcionalno-Integralni regulator brzine, veoma brz odziv momenta, Njutnova jednačina ----------------------- -------------
Dinamičke karakteristike • Posmatramo sisteme drugog reda • Promena upravljačkog ulaza kao “step funkcija” • Dva različita slučaja: • Sa konjugovano kompleksnim polovima. • Sa realnim polovima (koji u opštem slučaju nisu jednaki, ali bi mogli biti).
Dominantni konjugovano-kompleksni polovi u(t) y(t) Y(p) U(p) Fw(p)
Dominantni konjugovano-kompleksni poloviKorišćene oznake: ωn– prirodna (neprigušena) učestanost ζ– faktor relativnog prigušenja π–preskok [%] Ts–vreme smirivanja Tk – vreme kašnjenja – period oscilacija Tu – vreme uspona Td – dominantna vremenska konstanta Tr– vreme reagovanja
Dominantni konjugovano-kompleksni polovi Ts ±5% (±2%) Td
Dominantni realni polovi (dva realna pola) u(t) y(t) Y(p) U(p) Fw(p)
Dominantni realni polovi (dva realna pola)Korišćene oznake: Ts–vreme smirivanja Tk – vreme kašnjenja Tu – vreme uspona Td – dominantna vremenska konstanta • Ne mogu se definisati: • ωn– prirodna (neprigušena) učestanost • ζ – faktor relativnog prigušenja • π –preskok [%] • τ – period oscilacija • Tr– vreme reagovanja
Dominantni realni polovi (dva realna pola) ±5% (±2%) Ts Td